RSS System Architecture Overview¶
This section sketches the integration of RSS into a exisiting system architecture.
Overview: Sense, Plan, Act, RSS¶
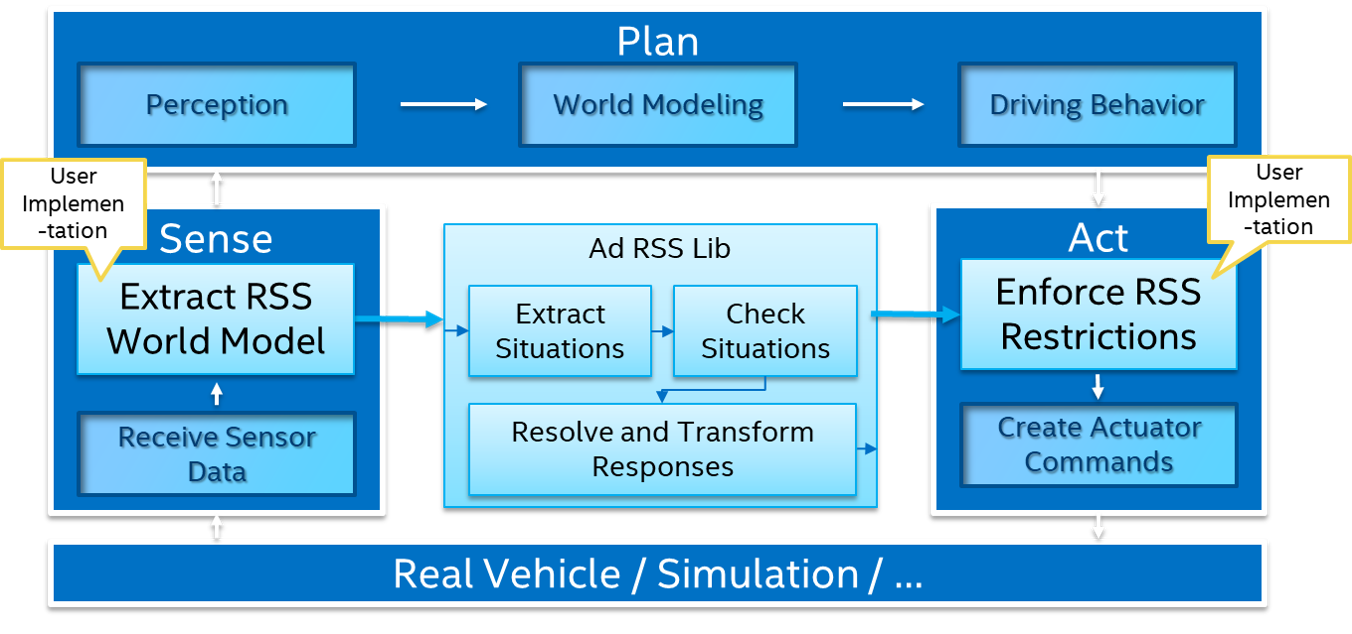
From high level view the architecture of an Automated Driving System (ADS) consists of three main subsystems: Sense, Plan, Act. The world model data provided by the Sense Subsystem is used by the Plan Subsystem to create the near term actuator control commands executed by the Act Subsystem.
 |
|---|
| Integration of RSS into a generic system architecture of an Automated Driving System |
RSS is integrated into such an ADS architecture by placing it in parallel to the Plan. To provide a safety envelope around the planning output the integration of RSS into a ADS architecture spans into the Sense Subsystem to provide the required RSS world model data as well as into the Act Subsystem to limit the actuator control commands to the RSS restrictions.
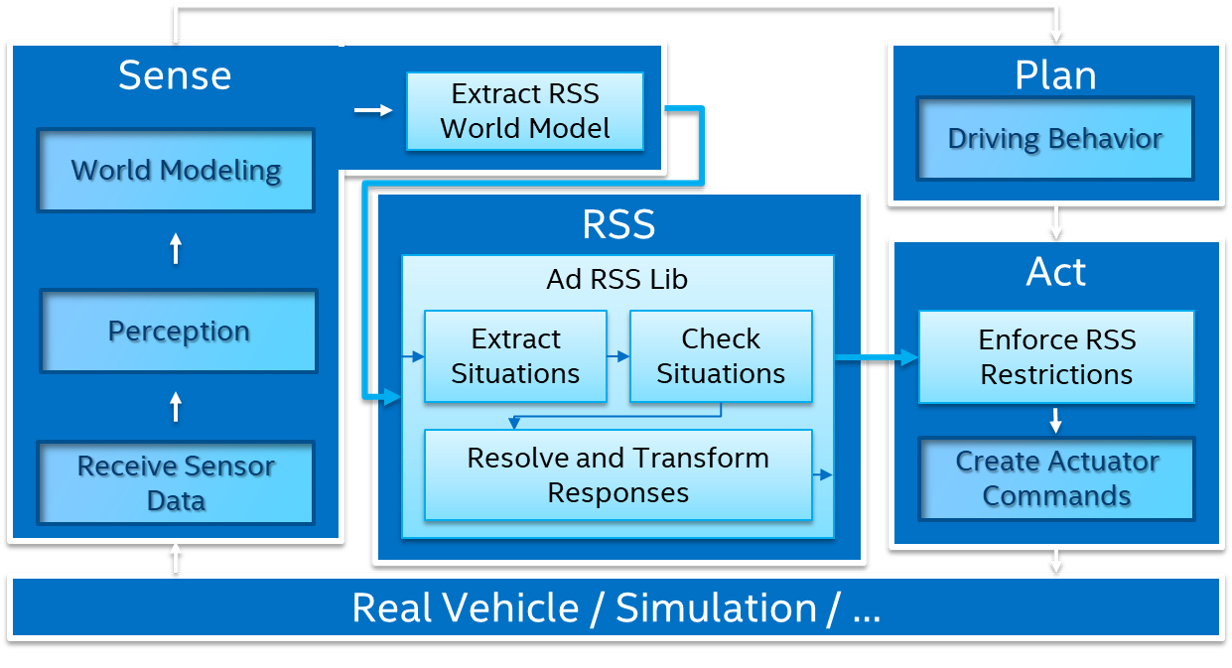
The Sense Subsystem gathers information on the environment required to fulfill the ADS task. In general there exist several level of perception and fusion which enrich the world model to the extend required for the planning algorithms. In this high-level architecture overview the Sense Subsystem takes over this task. That sketches a slightly different view:
 |
|---|
| RSS foccussed view on the Integration of RSS into a ADS architecture |
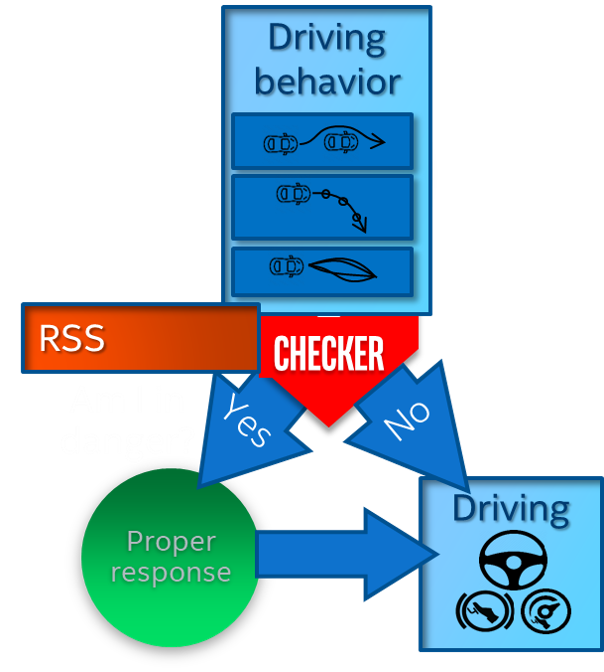
This view stresses on how RSS acts as a Doer-Checker on the Plan Subsystem. At a high level, RSS accomplishes this by doing three key things:
- Define a safety envelope around the car; the minimum distance, longitudinally and laterally, that should be maintained to avoid danger. By doing this, establish the so called Danger Threshold: the moment in time that the safety envelope has been compromised.
- RSS acts as a Doer-Checker on the Plan Subsystem of an ADS. With the safety envelope defined, the question is asked: will the planned action compromise that envelope? Is the proposed action unsafe? If RSS determines it is safe, the ADS can act upon it. If not,
- execute the Proper Response, the third component that defines how the ADS and/or the other party involved must react to get out of the danger and return to a safe state.
 |
|---|
| RSS acting as a Doer-Checker on the planning module |
Sense Subsystem¶
The Sense Subsystem is responsible for the perception of the environment. It interfaces to the real world by receiving, processing and fusing sensor information. It provides all information in form of the world model to the other ADS subsystems. The exact content of the world model data is highly dependent on the concrete realization of the receiving and processing subsystems, especially the degree of perception and fusion applied will differ. The provided world model data might include raw sensor data, high level object data, but also a-priori knowledge such as AD map data. To account for this the Sense Subsystem provides separate output ports for every connected subsystem.
| Port | Name | Explanation |
|---|---|---|
| Input | sensorData | The sensor input from the real vehicle or connected simulation |
| Output | planWorldModelData | The world model data required by the Plan Subsystem |
| Output | rssWorldModelData | The world model data required by the RSS Subsystem |
Extract RSS World Model¶
The Extract RSS World Model entity is responsible to transform the internal world model data of the Sense subsytem into the input world model data rssWorldModelData ad::rss::world::WorldModel required by the RSS Subsystem. The user has to implement this functionality as part of the RSS integration efforts into the ADS system. The ad_rss_map_integration library provides an example implementation based on automated driving maps on how such might be calculated and how the global Cartesian data can be transformed into a lane based representation.
RSS Subsystem¶
The RSS Subsystem realizes the core RSS functionality. It implements the RSS checks based on the ad::rss::world::WorldModel received from the Extract RSS World Model entity:
- Do not his someone from behind
- Do not cut-in recklessly
- Right-of-Way is given, not taken
- Be careful in areas with limited visibility [not implemented yet]
- If you can avoid a crash without causing another, you must [not implemented yet]
In case a dangerous situation is detected a proper response and respective acceleration restrictions are calculated to enable the realization of the planning safety on the actuator control commands of the Plan Subsystem.
| Port | Name | Explanation |
|---|---|---|
| Input | rssWorldModelData | The world model data required to calculate the RSS checks |
| Output | rssProperResponse | The proper response calculated by RSS |
| Output | rssAccelerationRestrictions | The restrictions on the vehicle acceleration calculated by RSS |
Extract Situation¶
The Extract Situation entity transforms the world model data into relative constellations between the ego vehicle and each of the objects for RSS internal calculations. For every constellation ad::rss::world::Constellation of the input world model data the relative constellation ad::rss::core::RelativeConstellation is calculated.
| Port | Name | Explanation |
|---|---|---|
| Input | rssWorldModelData | Lane based world model constellations on the surrounding environment required to create the relative constellations. Requires local map data (i.e. lane segments and semantics on intersections and priority rules), ego vehicle and object (i.e. position, velocity and RSS dynamics) information. |
| Output | rssSituationSnapshot | A list of relative RSS constellations between the ego vehicle and each of the objects. Each relative constellation is formulated within its own constellation based coordinate system. EgoVehicle and Objects: i.e. relative position, velocity, priority flag, constellation specific RSS acceleration values. |
Check Situation¶
The Check Situation entity performs the RSS check on all incoming relative constellations and creates the RssStateSnapshot ad::rss::state::RssState containing the required individual responses for the detected dangerous constellations.
| Port | Name | Explanation |
|---|---|---|
| Input | rssSituationSnapshot | A list of relative RSS constellations between the ego vehicle and each of the objects. |
| Output | rssStateSnapshot | A list of RSS states in respect to the relative RSS constellations including the constellation specific responses. |
Resolve and Transform Responses¶
The Resolve and Transform Responses entity handles conflicts of the incoming RSS states of the RssStateSnapshot. It combines the individual constellation specific responses into one single overall ProperResponse ad::rss::state::ProperResponse and provides the related AccelerationRestrictions ad::rss::world::AccelerationRestriction for the actuator commands.
| Port | Name | Explanation |
|---|---|---|
| Input | rssStateSnapshot | A list of RSS states in respect to the relative constellations |
| Output | rssProperResponse | Resulting combined overall proper response including the resulting restrictions of the actuator control command |
Plan Subsystem¶
The Plan subsystem performs the decision-making of the ADS. It analyses the provided planWorldModelData and decides what action to take. Finally, this leads to concrete control commands for the ADS Act Subsystem defining the next move of the ADS.
| Port | Name | Explanation |
|---|---|---|
| Input | planWorldModelData | The world model data required by the Plan Subsystem |
| Output | actuatorControlCommand | The control commands to realize the next moves within the current plan |
Act Subsystem¶
The Act Subsystem executes the moves which the Plan Subsystem has calculated. It receives the ActuatorControlCommands controlling i.e. acceleration, braking and steering to execute the plan.
| Port | Name | Explanation |
|---|---|---|
| Input | actuatorControlCommand | The control commands to realize the next moves within the current plan. |
| Input | rssProperResponse | The proper resonse including the restrictions on the acceleration for the vehicle calculated by RSS. |
| Output | controlData | The control output for the real vehicle or connected simulation |
Enforce RSS Restrictions¶
The Enforce RSS Restrictions entity receives the actuator control commands from the Plan Subsystem and restricts the control values according to the restrictions calculated by RSS. The resulting actuator control commands are safe in respect to RSS rules. This calculation heavily depends on the actual representation of the ActuatorControlCommands data. Therefore, a generic implementation is not possible and the user has to implement this functionality as part of the RSS integration efforts into the ADS.
| Port | Name | Explanation |
|---|---|---|
| Input | rssProperResponse | The proper resonse including the restrictions on the acceleration for the vehicle calculated by RSS. |
| Input | actuatorControlCommandIn | The control commands from the Plan Subsystem to control the vehicle actuator system |
| Output | actuatorControlCommandOut | The adapted control commands from the Plan Subsystem to control the vehicle actuator system in a RSS safe manner |