#include <ad/rss/situation/Situation.hpp>
Public Types | |
| typedef std::shared_ptr< Situation > | Ptr |
| Smart pointer on Situation. | |
| typedef std::shared_ptr< Situation const > | ConstPtr |
| Smart pointer on constant Situation. | |
Public Member Functions | |
| Situation ()=default | |
| standard constructor | |
| ~Situation ()=default | |
| standard destructor | |
| Situation (const Situation &other)=default | |
| standard copy constructor | |
| Situation (Situation &&other)=default | |
| standard move constructor | |
| Situation & | operator= (const Situation &other)=default |
| standard assignment operator More... | |
| Situation & | operator= (Situation &&other)=default |
| standard move operator More... | |
| bool | operator== (const Situation &other) const |
| standard comparison operator More... | |
| bool | operator!= (const Situation &other) const |
| standard comparison operator More... | |
Detailed Description
DataType Situation.
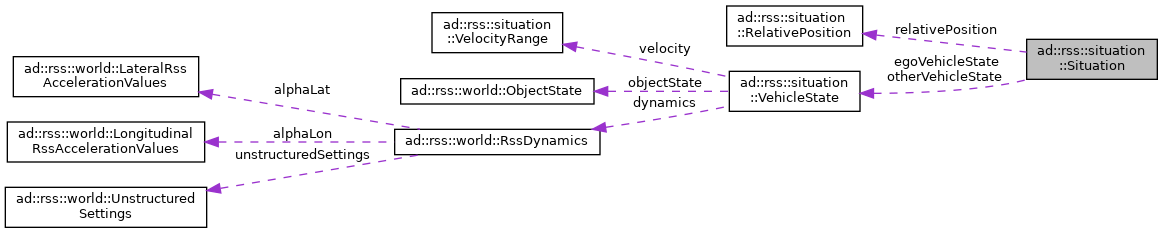
Describes a RSS situation. A situation always considers the relative relation between two objects: the ego vehicle and one other vehicle. The situation coordinate system is unique for one specific situation. As a consequence the vehicle state of the ego vehicle in different RSS situations cannot be compared to each other. Consists of a situation id and type, the VehicleState of the ego vehicle, the VehicleState of the other vehicle and the RelativePosition between ego vehicle and other vehicle.
Member Function Documentation
◆ operator!=()
|
inline |
◆ operator=() [1/2]
◆ operator=() [2/2]
◆ operator==()
|
inline |
Member Data Documentation
◆ egoVehicleState
| ::ad::rss::situation::VehicleState ad::rss::situation::Situation::egoVehicleState |
The vehicle state of the ego vehicle
◆ objectId
| ::ad::rss::world::ObjectId ad::rss::situation::Situation::objectId |
Defines the unique id of an object. This id has to be constant over time for the same object.
◆ otherVehicleState
| ::ad::rss::situation::VehicleState ad::rss::situation::Situation::otherVehicleState |
The vehicle state of the other vehicle within the situation.
◆ relativePosition
| ::ad::rss::situation::RelativePosition ad::rss::situation::Situation::relativePosition |
The relative position between the ego vehicle and the other vehicle within this situation.
◆ situationId
| ::ad::rss::situation::SituationId ad::rss::situation::Situation::situationId |
The unique id of the situation. The situation id has to be constant over time for a pair of ego vehicle and specific other vehicle. E.g. might be filled with an id identifying the other vehicle unambiguously.
◆ situationType
| ::ad::rss::situation::SituationType ad::rss::situation::Situation::situationType |
The type of the current situation.
The documentation for this struct was generated from the following file:
- generated/include/ad/rss/situation/Situation.hpp