DataType WorldModel. More...
#include <ad/rss/world/WorldModel.hpp>
Public Types | |
| typedef std::shared_ptr< WorldModel > | Ptr |
| Smart pointer on WorldModel. | |
| typedef std::shared_ptr< WorldModel const > | ConstPtr |
| Smart pointer on constant WorldModel. | |
Public Member Functions | |
| WorldModel ()=default | |
| standard constructor | |
| ~WorldModel ()=default | |
| standard destructor | |
| WorldModel (const WorldModel &other)=default | |
| standard copy constructor | |
| WorldModel (WorldModel &&other)=default | |
| standard move constructor | |
| WorldModel & | operator= (const WorldModel &other)=default |
| standard assignment operator More... | |
| WorldModel & | operator= (WorldModel &&other)=default |
| standard move operator More... | |
| bool | operator== (const WorldModel &other) const |
| standard comparison operator More... | |
| bool | operator!= (const WorldModel &other) const |
| standard comparison operator More... | |
Public Attributes | |
| ::ad::rss::world::TimeIndex | time_index {0u} |
| ::ad::rss::world::RssDynamics | default_ego_vehicle_rss_dynamics |
| ::ad::rss::world::ConstellationVector | constellations |
Detailed Description
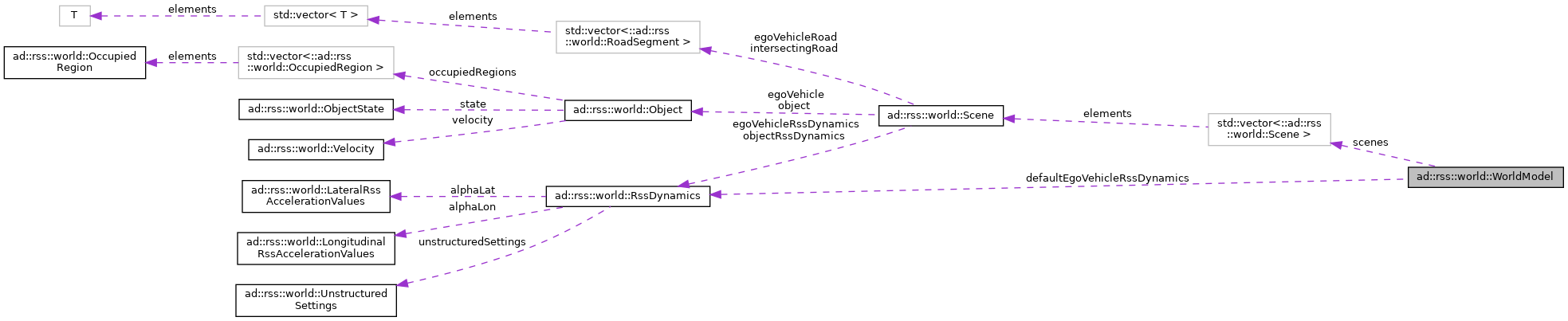
DataType WorldModel.
The world model RSS requires as input describing a situation consisting of a time_index, the ego_vehicle_dynamics and object description as well as the list of relevant constellations.
Member Function Documentation
◆ operator!=()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other WorldModel.
- Returns
trueif both WorldModel are different
◆ operator=() [1/2]
|
default |
standard assignment operator
- Parameters
-
[in] other Other WorldModel
- Returns
- Reference to this WorldModel.
◆ operator=() [2/2]
|
default |
◆ operator==()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other WorldModel
- Returns
trueif both WorldModel are equal
Member Data Documentation
◆ constellations
| ::ad::rss::world::ConstellationVector ad::rss::world::WorldModel::constellations |
All constellations.
◆ default_ego_vehicle_rss_dynamics
| ::ad::rss::world::RssDynamics ad::rss::world::WorldModel::default_ego_vehicle_rss_dynamics |
Defines the standard ego vehicle dynamics to be applied i.e. when there is no dangerous constellation. This parameters are provided in addtion on a per constellation basis to be able to adapt these e.g. in respect to object type or the weather conditions
◆ time_index
| ::ad::rss::world::TimeIndex ad::rss::world::WorldModel::time_index {0u} |
The time index is required to distinguish different points in time when tracking states or transforming responses back. Each world model referring to another point in time should get another time index. The time index of the world model must not be zero.
The documentation for this struct was generated from the following file:
- generated/include/ad/rss/world/WorldModel.hpp