C++ library for integrating Responsibility Sensitive Safety (RSS) with automated driving maps¶
Table of contents¶
Introduction ¶
This ad_rss_map_integration library provides a C++ implementation for integrating Responsibility Sensitive Safety (RSS) with automated driving maps. When RSS is to be integrated into a larger system it is usually up to the user implementation to provide the required input into RSS based on the environment information available within the system.
 |
|---|
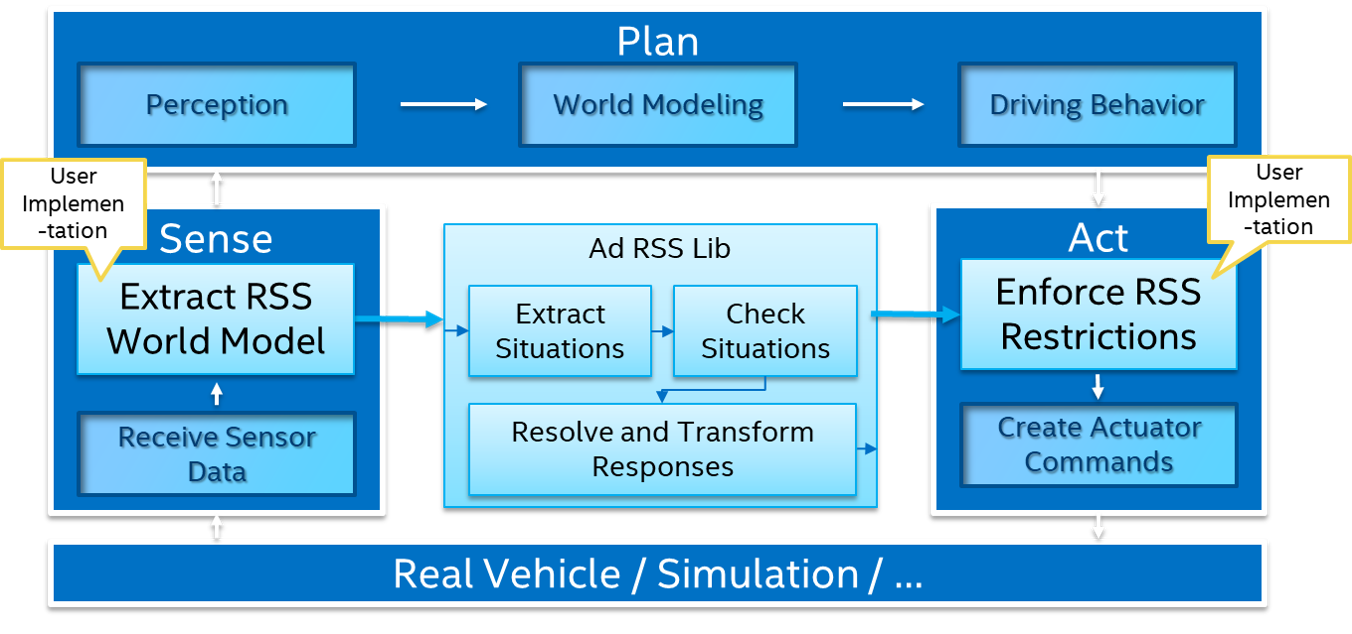
| Integration of RSS into an AD system with its general Sense, Plan and Act main components |
To calculate such input to RSS, the ad::rss::world::WorldModel, usually a-priori knowledge on the environment
and especially on map information is required: Given the positions of all of the traffic participants,
a map matched position has to be calculated and a combination of route planning and prediction based
on the road topology has to be performed. Then, the route connecting the ego-vehicle and the
other vehicle has to be analyzed to deduce the kind of RSS-constellation between those two: driving on same road in same direction,
in opposite direction or being faced with an intersection with respective priority rules.
If the kind of constellation is derived, the relevant road areas and object/vehicle information have to be
transformed into the suitable world model format expected by the ‘C++ library for RSS’ (ad_rss) for further analysis.
These steps are not trivial. To enable the community to understand and evaluate RSS further, this library provides an exemplary implementation of these steps. The implementation within this library neither can be seen to be complete, fully correct or final, nor it is claiming to be the only way of doing that. It's rather a piece of software required to perform more thoroughly analysis within a simulation framework like e.g. CARLA driving simulator.
This library makes use of the ad_map_access interface to interact with AD map data: read the AD map data from the OpenDRIVE maps provided with CARLA, perform required matching, planning and analysis operations.
High Level Design ¶
The high level design documentation provides more insights on the architecture and functionality of this library.
API documentation ¶
Detailed documentation on API level is available via Doxygen documentation within the code.
Python Binding ¶
There is also a python binding for the ad_map_access library available: ad_rss_map_integration_python