#include <ad/rss/world/Scene.hpp>
Public Types | |
| typedef std::shared_ptr< Scene > | Ptr |
| Smart pointer on Scene. | |
| typedef std::shared_ptr< Scene const > | ConstPtr |
| Smart pointer on constant Scene. | |
Public Member Functions | |
| Scene ()=default | |
| standard constructor | |
| ~Scene ()=default | |
| standard destructor | |
| Scene (const Scene &other)=default | |
| standard copy constructor | |
| Scene (Scene &&other)=default | |
| standard move constructor | |
| Scene & | operator= (const Scene &other)=default |
| standard assignment operator More... | |
| Scene & | operator= (Scene &&other)=default |
| standard move operator More... | |
| bool | operator== (const Scene &other) const |
| standard comparison operator More... | |
| bool | operator!= (const Scene &other) const |
| standard comparison operator More... | |
Detailed Description
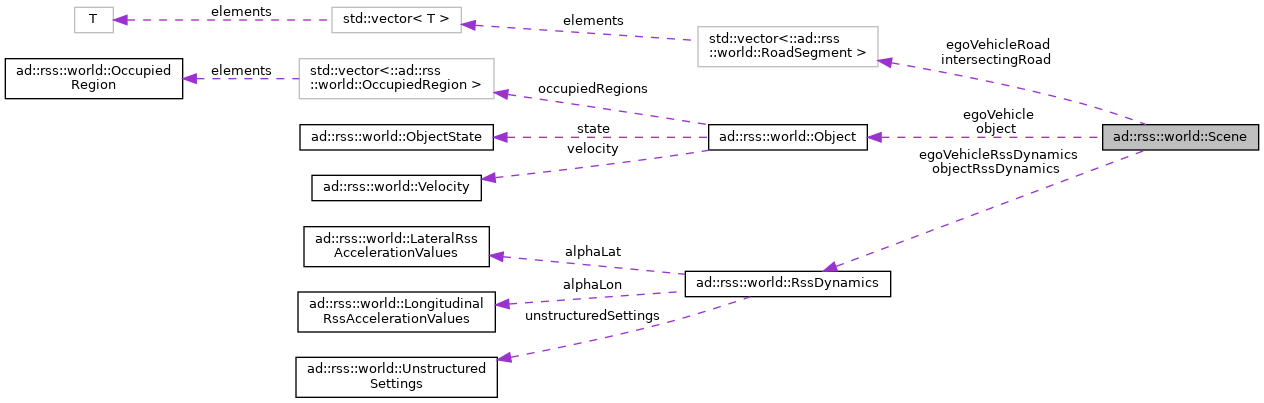
DataType Scene.
A Scene defines the relation between the ego vehicle and another object. It consists of the type of situation between these two, the objects rss dynamics and the corresponding road areas of interest. All lane segments on the route between ego vehicle and the object have to be part of this. RSS has to be able to calculate minimum and maximum distances between ego vehicle and object as well as accelerated movements within this area.
Member Function Documentation
◆ operator!=()
|
inline |
◆ operator=() [1/2]
◆ operator=() [2/2]
◆ operator==()
|
inline |
Member Data Documentation
◆ egoVehicle
| ::ad::rss::world::Object ad::rss::world::Scene::egoVehicle |
The ego vehicle in the context of this scene.
◆ egoVehicleRoad
| ::ad::rss::world::RoadArea ad::rss::world::Scene::egoVehicleRoad |
The RssRoadArea the ego vehicle is driving in. The driving direction of the ego vehicle define the ordering of the road segments. In non-intersection situations the object is also driving in this road area.
◆ egoVehicleRssDynamics
| ::ad::rss::world::RssDynamics ad::rss::world::Scene::egoVehicleRssDynamics |
Defines the ego vehicle dynamics to be applied. This parameters are provided on a per situation basis to be able to adapt these e.g. in respect to object type.
◆ intersectingRoad
| ::ad::rss::world::RoadArea ad::rss::world::Scene::intersectingRoad |
The RssRoadArea an intersecting vehicle is driving in. The driving direction of the intersecting vehicle define the ordering of the road segments. The road area should contain all neigboring lanes the other vehcile is able to drive in. In non-intersection situations this road area is empty.
◆ object
| ::ad::rss::world::Object ad::rss::world::Scene::object |
The object this scene refers to.
◆ objectRssDynamics
| ::ad::rss::world::RssDynamics ad::rss::world::Scene::objectRssDynamics |
Defines the objects dynamics to be applied. This parameters are provided on a per object basis to be able to adapt these e.g. in respect to object type or the weather conditions.
◆ situationType
| ::ad::rss::situation::SituationType ad::rss::world::Scene::situationType {::ad::rss::situation::SituationType::SameDirection} |
The type of the current situation. Depending on this type the other fields of the RssArea might be left empty.
The documentation for this struct was generated from the following file:
- generated/include/ad/rss/world/Scene.hpp