RealSense™ for SLAM and Navigation¶
1. Overview¶
SLAM with cartographer requires laser scan data for robot pose estimation. Intel® RealSense™ depth cameras (D400 series) can generate depth image, which can be converted to laser scan with depthimage_to_laserscan package and t265 camera can provide pose information as a odometer. Therefore, we provide a way to use RealSense™ for SLAM and navigation.
2. SLAM with RealSense™¶
Install dependencies
source /opt/robot_devkit/robot_devkit_setup.bash
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src
git clone https://github.com/ros-perception/depthimage_to_laserscan -b dashing-devel
cd .. && colcon build
source ~/ros2_ws/install/local_setup.bash
Start to SLAM
# In terminal 1, launch cartographer node
source ~/ros2_ws/install/local_setup.bash
ros2 launch realsense_examples rs_cartographer.launch.py
# In terminal 2, launch Intel® RealSense™ D400 camera and T265 camera
# You should config the serial number and tf in the launch file ros2_intel_realsense/realsense_examples/launch/rs_t265_and_d400.launch.py before launch the camera
source /opt/robot_devkit/robot_devkit_setup.bash
ros2 launch realsense_examples rs_t265_and_d400.launch.py
# In terminal 3, launch the turtlebot3 for RealSense™ SLAM
export TURTLEBOT3_MODEL=waffle
source /opt/robot_devkit/robot_devkit_setup.bash
ros2 launch realsense_examples tb3_robot.launch.py
# In terminal 4, launch the teleoperation node for robot
source /opt/robot_devkit/robot_devkit_setup.bash
export TURTLEBOT3_MODEL=waffle
ros2 run turtlebot3_teleop teleop_keyboard
Control and move the turtlebot3 with keyboard to build map, and when the map building process is done, please save the map with the following command:
# In terminal 5
source /opt/robot_devkit/robot_devkit_setup.bash
source /opt/ros/dashing/local_setup.bash
ros2 run nav2_map_server map_saver -f ~/map
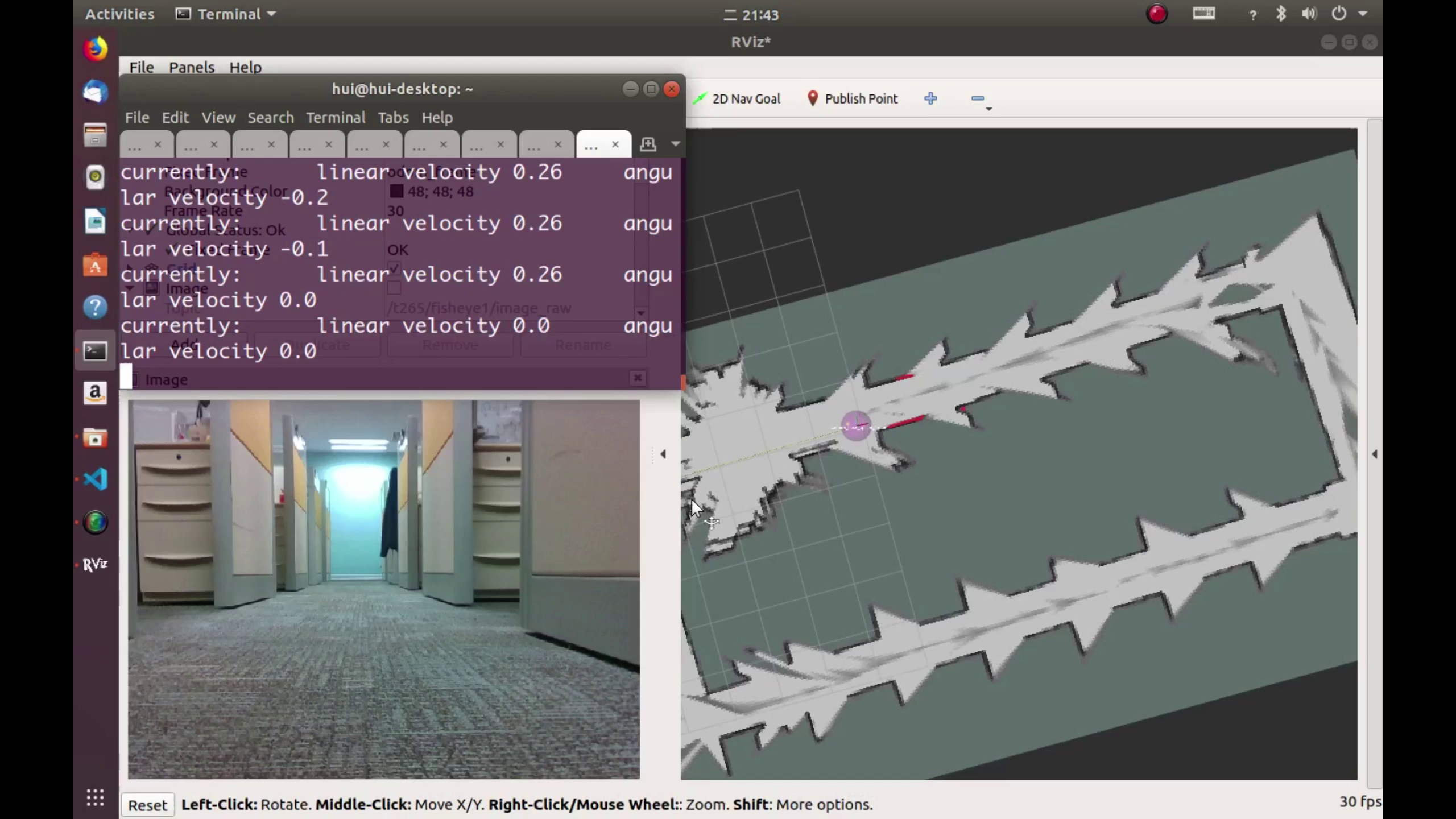
Next, try to open and preview the map.pgm to confirm it. The following is a map built with RealSense™ and cartographer:
4. Known issues¶
- Keep the RealSense™ parallel to the ground, or the tilt of the RealSense™ may influence the SLAM.