RealSense™ Camera¶
1. Overview¶
These are packages for using Intel® RealSense™ cameras (D400 series and T265) with ROS2.
2. Running the demo¶
Start the camera node
To start the camera node in ROS2, plug in the camera, then type the following command:
source /opt/robot_devkit/robot_devkit_setup.bash
# To launch with "ros2 run"
ros2 run realsense_node realsense_node
# Or use "ros2 launch"
ros2 launch realsense_examples rs_camera.launch.py
This will stream all camera sensors and publish on the appropriate ROS2 topics. PointCloud2 is enabled by default.
View camera data
# in Terminal #1 launch realsense_ros2_camera
source /opt/robot_devkit/robot_devkit_setup.bash
ros2 launch realsense_examples rs_camera.launch.py
# in terminal #2 launch rviz2
source /opt/robot_devkit/robot_devkit_setup.bash
rviz2
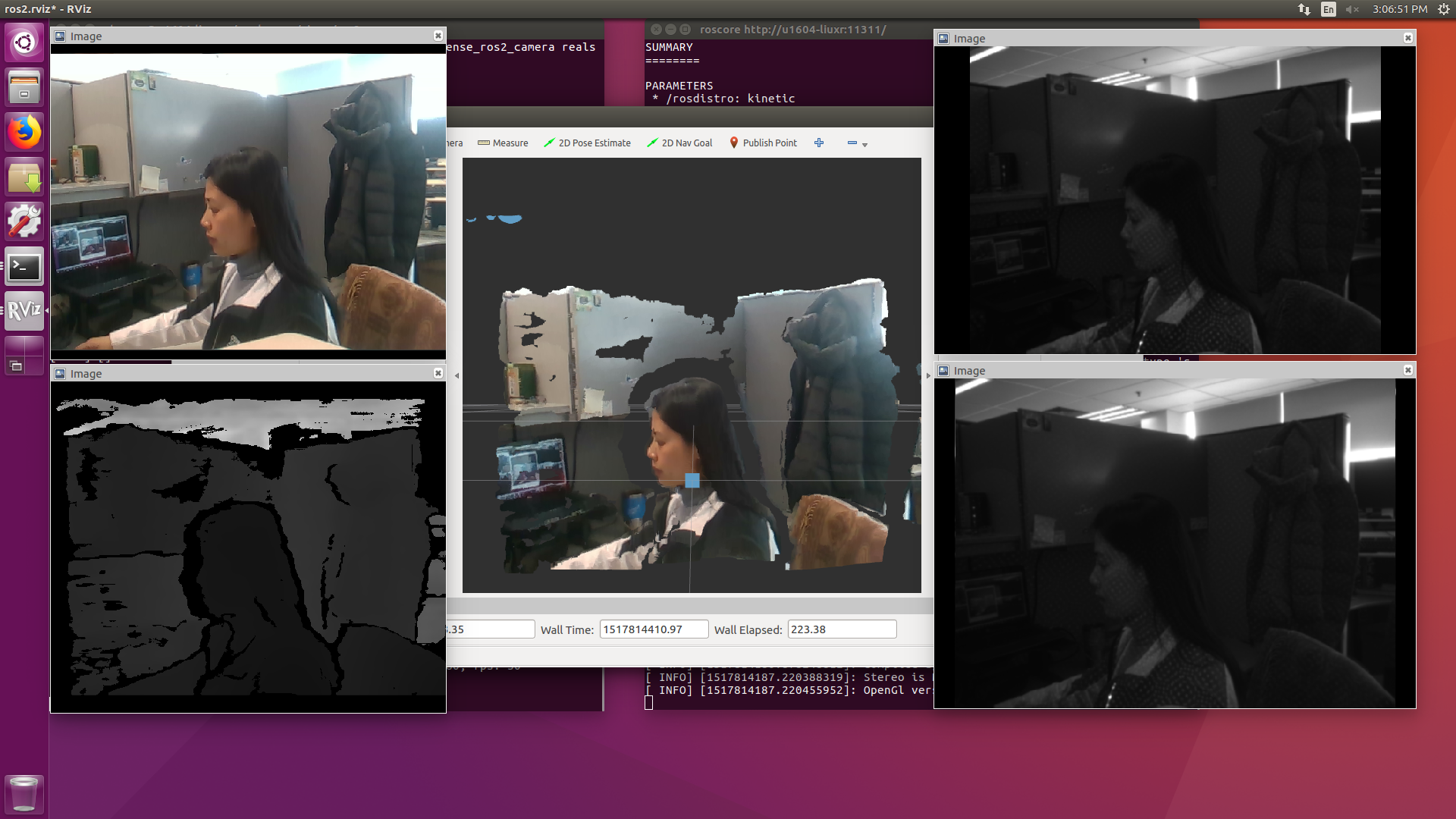
This will launch RVIZ2 and display the five streams: color, depth, infra1, infra2, pointcloud.
Note
There are two coordinates in the package, one represents the space coordinate and the other represents the image coordinate:

Realsense can also support SLAM and navigation, see here.
3. Key Interfaces¶
4. Known Issues¶
- This ROS2 node does not currently provide any dynamic reconfigure support for camera properties/presets.
- We support Ubuntu Linux 18.04 (Bionic Beaver) on 64-bit, but not support Mac OS X and Windows yet.