Navigation2¶
1. Overview¶
The ROS 2 Navigation System is the control system that enables a robot to autonomously reach a goal state, such as a specific position and orientation relative to a specific map. Given a current pose, a map, and a goal, such as a destination pose, the navigation system generates a plan to reach the goal, and outputs commands to autonomously drive the robot, respecting any safety constraints and avoiding obstacles encountered along the way.
2. Running the demo¶
The nav2_bringup package is an example bringup system for
navigation2 applications.
Note
- We recommend doing this on a Ubuntu 18.04 installation. We have build issues on 16.04. (see https://github.com/ros-planning/navigation2/issues/353)
- This stack and ROS2 are still in heavy development and there are some bugs and stability issues being worked on, so please do not try this on a robot without taking heavy safety precautions. THE ROBOT MAY CRASH!
- It is recommended to start with simulation using Gazebo before proceeding to run on a physical robot
2.1 Launch Navigation2 in simulation with Gazebo¶
Pre-requisites:¶
- Gazebo installed on the system
- gazebo_ros_pkgs for ROS2 installed on the system
- A Gazebo world for simulating the robot (see Gazebo tutorials)
- A map of that world saved to a map.pgm and map.yaml (see ROS Navigation tutorials)
Terminal 1: Config turtlebot3 and Gazebo simulation environment
Example: See turtlebot3_gazebo models for details.
source /opt/robot_devkit/robot_devkit_setup.bash
echo export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:`ros2 pkg prefix turtlebot3_gazebo`/share/turtlebot3_gazebo/models/ >> ~/.bashrc
echo export TURTLEBOT3_MODEL=waffle >> ~/.bashrc
echo ROS_DOMAIN_ID=30 >> ~/.bashrc
view result at rviz2 and Gazebo
Terminal 2: Launch your robot in Gazebo
source /opt/robot_devkit/robot_devkit_setup.bash
source /opt/ros/dashing/local_setup.bash
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
Terminal 3: Launch navigation2
source /opt/robot_devkit/robot_devkit_setup.bash
source /opt/ros/dashing/local_setup.bash
# Launch the nav2 system
ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True autostart:=True \
map:=`ros2 pkg prefix turtlebot3_navigation2`/share/turtlebot3_navigation2/map/map.yaml
Note
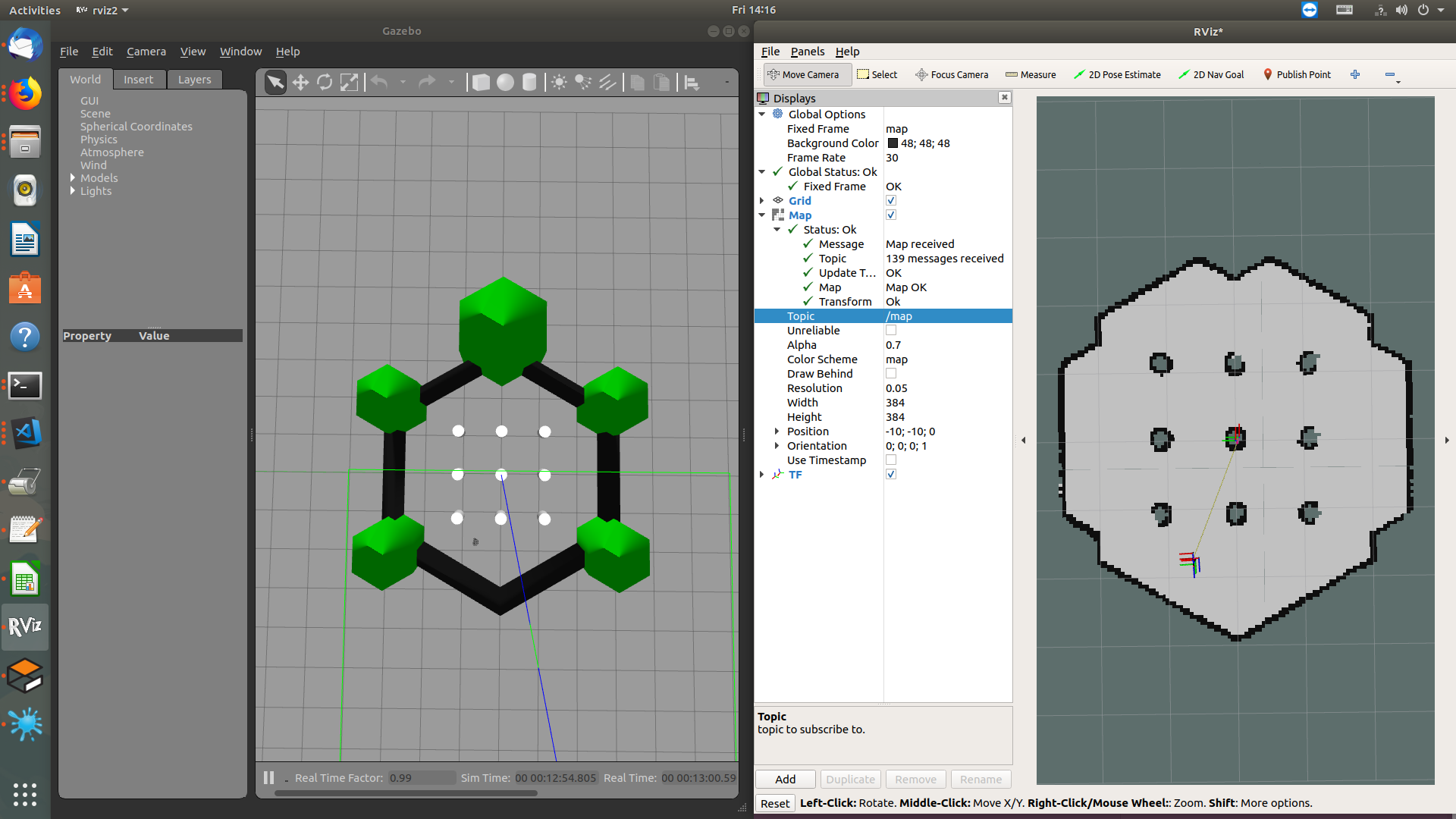
In RViz:
- You should see the map.
- Hit the “Startup” button.
- Localize the robot using “2D Pose Estimate” button.
- Make sure all transforms from odom are present. (odom->base_link->base_scan)
- Send the robot a goal using “Navigation2 Goal” button. Note: this uses a ROS2 Action to send the goal, and a pop-up window will appear on your screen with a ‘cancel’ button if you wish to cancel.
To view the robot model in RViz:
- Add “RobotModel”, set “Description Source” with “File”, set “Description File” with the name of the urdf file for your robot (example: turtlebot3_burger.urdf)”
3. Known issues¶
- This stack and ROS2 are still in heavy development and there are some bugs and stability issues being worked on, so please do not try this on a robot without taking heavy safety precautions. THE ROBOT MAY CRASH!
- For a current list of known issues, see https://github.com/ros-planning/navigation2/issues.
4. ToDo¶
- Add additional maps and examples.
- Add instructions for running navigation2 with SLAM.