DataType RssDynamics. More...
#include <ad/rss/world/RssDynamics.hpp>
Public Types | |
| typedef std::shared_ptr< RssDynamics > | Ptr |
| Smart pointer on RssDynamics. | |
| typedef std::shared_ptr< RssDynamics const > | ConstPtr |
| Smart pointer on constant RssDynamics. | |
Public Member Functions | |
| RssDynamics ()=default | |
| standard constructor | |
| ~RssDynamics ()=default | |
| standard destructor | |
| RssDynamics (const RssDynamics &other)=default | |
| standard copy constructor | |
| RssDynamics (RssDynamics &&other)=default | |
| standard move constructor | |
| RssDynamics & | operator= (const RssDynamics &other)=default |
| standard assignment operator More... | |
| RssDynamics & | operator= (RssDynamics &&other)=default |
| standard move operator More... | |
| bool | operator== (const RssDynamics &other) const |
| standard comparison operator More... | |
| bool | operator!= (const RssDynamics &other) const |
| standard comparison operator More... | |
Public Attributes | |
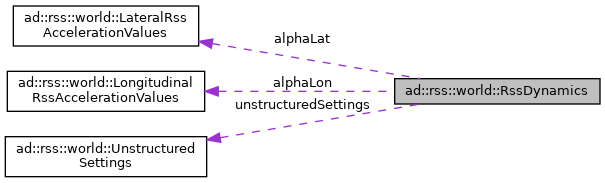
| ::ad::rss::world::LongitudinalRssAccelerationValues | alpha_lon |
| ::ad::rss::world::LateralRssAccelerationValues | alpha_lat |
| ::ad::physics::Distance | lateral_fluctuation_margin {0.0} |
| ::ad::physics::Duration | response_time |
| ::ad::physics::Speed | max_speed_on_acceleration {100} |
| ::ad::rss::world::UnstructuredSettings | unstructured_settings |
| ::ad::physics::Distance | min_longitudinal_safety_distance {0.0} |
Detailed Description
DataType RssDynamics.
Describes the RSS dynamics values to be applied for an object within the metric world frame. The dynamics consist of a longitudinal component, a lateral component and a lateral fluctuation margin to be taken into account to compensate for lateral fluctuations.
Member Function Documentation
◆ operator!=()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other RssDynamics.
- Returns
trueif both RssDynamics are different
◆ operator=() [1/2]
|
default |
standard assignment operator
- Parameters
-
[in] other Other RssDynamics
- Returns
- Reference to this RssDynamics.
◆ operator=() [2/2]
|
default |
◆ operator==()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other RssDynamics
- Returns
trueif both RssDynamics are equal
Member Data Documentation
◆ alpha_lat
| ::ad::rss::world::LateralRssAccelerationValues ad::rss::world::RssDynamics::alpha_lat |
RSS dynamics values along lateral coordinate system axis.
◆ alpha_lon
| ::ad::rss::world::LongitudinalRssAccelerationValues ad::rss::world::RssDynamics::alpha_lon |
RSS dynamics values along longitudinal coordinate system axis.
◆ lateral_fluctuation_margin
| ::ad::physics::Distance ad::rss::world::RssDynamics::lateral_fluctuation_margin {0.0} |
Defines the lateral fluctuation margin to be taken into account.
◆ max_speed_on_acceleration
| ::ad::physics::Speed ad::rss::world::RssDynamics::max_speed_on_acceleration {100} |
Defines the maximum speed of the object to be considered while acceleration within the response time. The acceleration will be stopped if this speed limit is reached. In case the speed before the acceleration is already higher or equal to this value, no further acceleration will take place during the response time (in this case speed before response time == speed after response time).
◆ min_longitudinal_safety_distance
| ::ad::physics::Distance ad::rss::world::RssDynamics::min_longitudinal_safety_distance {0.0} |
The minimum longitudinal safety distance to be applied (defaults 0.) In structured case after the rss_longitudinal_safe_distance is calculated according to RSS formulas, this parameter value is added to the resulting safe distance: safe_distance += min_longitudinal_safety_distance, in unstructured case the ego vehicle is expanded by that distance towards the front before the trajectory sets are calculated. Therefore, this parameter value ensures the ego to be able to brake and keep a distance of min_longitudinal_safety_distance to the dangerous object or intersection area.
◆ response_time
| ::ad::physics::Duration ad::rss::world::RssDynamics::response_time |
Defines the response time of the object to be considered.
◆ unstructured_settings
| ::ad::rss::world::UnstructuredSettings ad::rss::world::RssDynamics::unstructured_settings |
Settings to be considered for evaluation in unstructured mode.
The documentation for this struct was generated from the following file:
- generated/include/ad/rss/world/RssDynamics.hpp