DataType VehicleState. More...
#include <ad/rss/situation/VehicleState.hpp>
Public Types | |
| typedef std::shared_ptr< VehicleState > | Ptr |
| Smart pointer on VehicleState. | |
| typedef std::shared_ptr< VehicleState const > | ConstPtr |
| Smart pointer on constant VehicleState. | |
Public Member Functions | |
| VehicleState ()=default | |
| standard constructor | |
| ~VehicleState ()=default | |
| standard destructor | |
| VehicleState (const VehicleState &other)=default | |
| standard copy constructor | |
| VehicleState (VehicleState &&other)=default | |
| standard move constructor | |
| VehicleState & | operator= (const VehicleState &other)=default |
| standard assignment operator More... | |
| VehicleState & | operator= (VehicleState &&other)=default |
| standard move operator More... | |
| bool | operator== (const VehicleState &other) const |
| standard comparison operator More... | |
| bool | operator!= (const VehicleState &other) const |
| standard comparison operator More... | |
Public Attributes | |
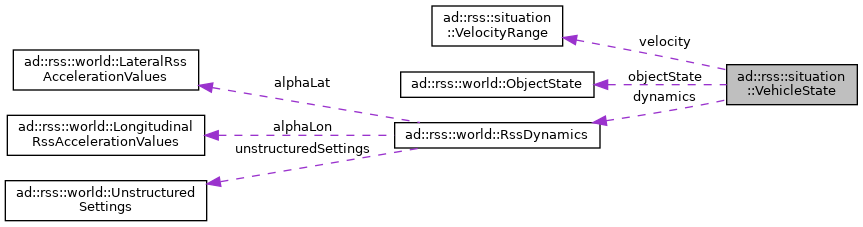
| ::ad::rss::situation::VelocityRange | velocity |
| ::ad::rss::world::RssDynamics | dynamics |
| bool | hasPriority {false} |
| bool | isInCorrectLane {false} |
| ::ad::physics::Distance | distanceToEnterIntersection {std::numeric_limits<::ad::physics::Distance>::max()} |
| ::ad::physics::Distance | distanceToLeaveIntersection {std::numeric_limits<::ad::physics::Distance>::max()} |
| ::ad::rss::world::ObjectType | objectType |
| ::ad::rss::world::ObjectState | objectState |
Detailed Description
DataType VehicleState.
The state of an object in a RSS situation. The state consists of the following components in respect to the situation coordinate system: the velocity, the distance to the intersection (if applicable), the dynamics, the response time, a Right-of-Way priority flag as well as a flag stating if the vehicle is driving in its correct lane.
Member Function Documentation
◆ operator!=()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other VehicleState.
- Returns
trueif both VehicleState are different
◆ operator=() [1/2]
|
default |
standard assignment operator
- Parameters
-
[in] other Other VehicleState
- Returns
- Reference to this VehicleState.
◆ operator=() [2/2]
|
default |
standard move operator
- Parameters
-
[in] other Other VehicleState
- Returns
- Reference to this VehicleState.
◆ operator==()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other VehicleState
- Returns
trueif both VehicleState are equal
Member Data Documentation
◆ distanceToEnterIntersection
| ::ad::physics::Distance ad::rss::situation::VehicleState::distanceToEnterIntersection {std::numeric_limits<::ad::physics::Distance>::max()} |
The minimum distance to be covered by the vehicle to enter the intersection.
◆ distanceToLeaveIntersection
| ::ad::physics::Distance ad::rss::situation::VehicleState::distanceToLeaveIntersection {std::numeric_limits<::ad::physics::Distance>::max()} |
The maximum distance to cover by the vehicle to leave the intersection completely.
◆ dynamics
| ::ad::rss::world::RssDynamics ad::rss::situation::VehicleState::dynamics |
The situation specific dynamics.
◆ hasPriority
| bool ad::rss::situation::VehicleState::hasPriority {false} |
Flag indicating if the situation specific Right-of-Way relation.
◆ isInCorrectLane
| bool ad::rss::situation::VehicleState::isInCorrectLane {false} |
Flag indicating if the vehicle driving in the correct lane
◆ objectState
| ::ad::rss::world::ObjectState ad::rss::situation::VehicleState::objectState |
The state of the object required to perform unstructured scene calculations.
◆ objectType
| ::ad::rss::world::ObjectType ad::rss::situation::VehicleState::objectType |
The type of object.
◆ velocity
| ::ad::rss::situation::VelocityRange ad::rss::situation::VehicleState::velocity |
The situation specific velocity range. Especially due to merge of different scenes into one situation the velocities might become a real range.
The documentation for this struct was generated from the following file:
- generated/include/ad/rss/situation/VehicleState.hpp