|
DPC++ Runtime
Runtime libraries for oneAPI DPC++
|


|
|
DPC++ Runtime
Runtime libraries for oneAPI DPC++
|
|
#include <sycl/access/access.hpp>#include <sycl/detail/defines.hpp>#include <sycl/detail/export.hpp>#include <sycl/detail/impl_utils.hpp>#include <sycl/detail/pi.h>#include <sycl/property_list.hpp>#include <cstddef>#include <memory>#include <variant>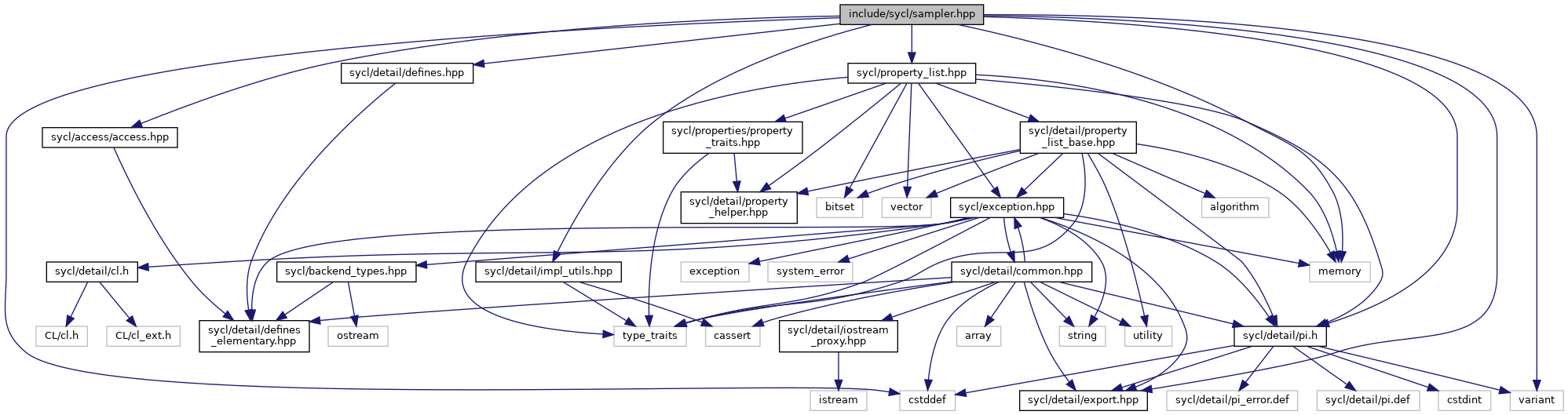

Go to the source code of this file.
Classes | |
| struct | sycl::_V1::image_sampler |
| struct | std::hash< sycl::sampler > |
Namespaces | |
| sycl | |
| sycl::_V1 | |
| sycl::_V1::detail | |
| std | |
Enumerations | |
| enum class | sycl::_V1::addressing_mode : unsigned int { sycl::_V1::mirrored_repeat = PI_SAMPLER_ADDRESSING_MODE_MIRRORED_REPEAT , sycl::_V1::repeat = PI_SAMPLER_ADDRESSING_MODE_REPEAT , sycl::_V1::clamp_to_edge = PI_SAMPLER_ADDRESSING_MODE_CLAMP_TO_EDGE , sycl::_V1::clamp = PI_SAMPLER_ADDRESSING_MODE_CLAMP , sycl::_V1::none = PI_SAMPLER_ADDRESSING_MODE_NONE } |
| enum class | sycl::_V1::filtering_mode : unsigned int { sycl::_V1::nearest = PI_SAMPLER_FILTER_MODE_NEAREST , sycl::_V1::linear = PI_SAMPLER_FILTER_MODE_LINEAR } |
| enum class | sycl::_V1::coordinate_normalization_mode : unsigned int { sycl::_V1::normalized = 1 , sycl::_V1::unnormalized = 0 } |
Functions | |
| class __SYCL_SPECIAL_CLASS | sycl::_V1::__SYCL_TYPE (sampler) sampler |
| Encapsulates a configuration for sampling an image accessor. More... | |