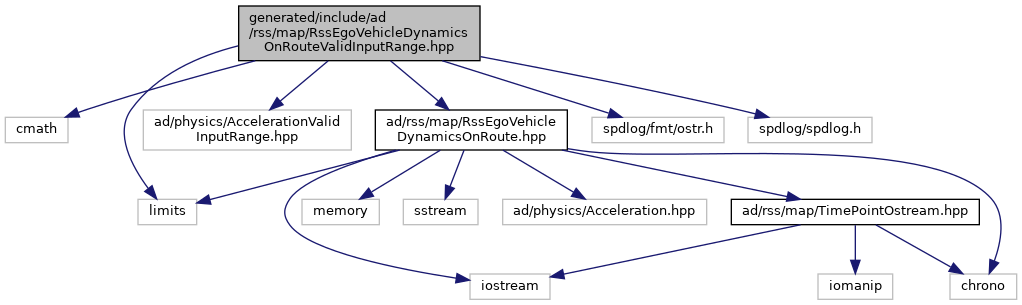
#include <cmath>#include <limits>#include "ad/physics/AccelerationValidInputRange.hpp"#include "ad/rss/map/RssEgoVehicleDynamicsOnRoute.hpp"#include "spdlog/fmt/ostr.h"#include "spdlog/spdlog.h"
Include dependency graph for RssEgoVehicleDynamicsOnRouteValidInputRange.hpp:
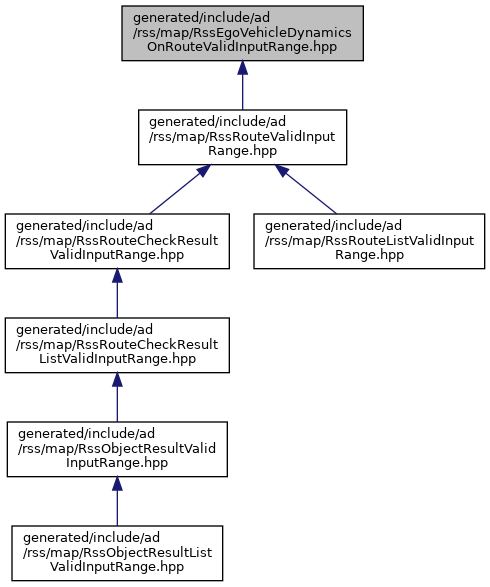
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| bool | withinValidInputRange (::ad::rss::map::RssEgoVehicleDynamicsOnRoute const &input, bool const logErrors=true) |
| check if the given RssEgoVehicleDynamicsOnRoute is within valid input range More... | |
Detailed Description
Generated file
Generator Version : 11.0.0-2046
Function Documentation
◆ withinValidInputRange()
|
inline |
check if the given RssEgoVehicleDynamicsOnRoute is within valid input range
- Parameters
-
[in] input the RssEgoVehicleDynamicsOnRoute as an input value [in] logErrors enables error logging
- Returns
trueif RssEgoVehicleDynamicsOnRoute is considered to be within the specified input range
- Note
- the specified input range is defined by the ranges of all members