Overview¶
ROS2 Grasp Library consists of
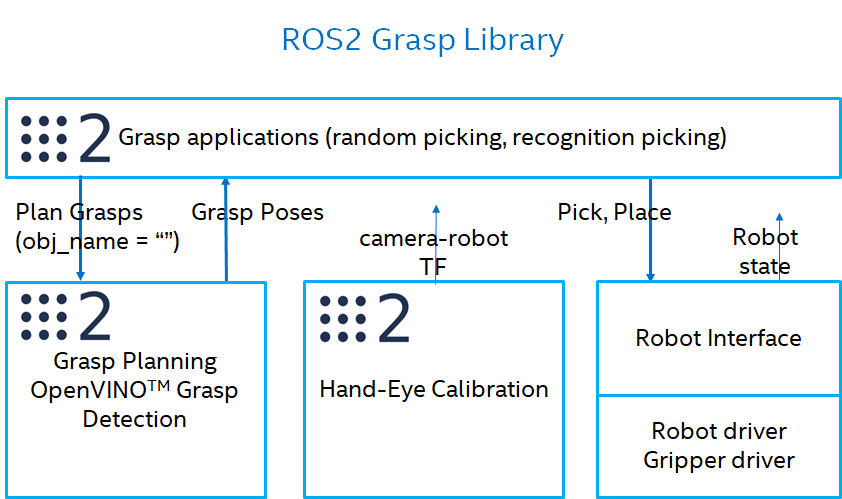
- A ROS2 Grasp Planner providing grasp planning service, as an extensible capability of MoveIt (moveit_msgs::srv::GraspPlanning), translating grasp detection results into MoveIt Interfaces (moveit_msgs::msg::Grasp). A ROS2 Grasp Detctor abstracting interfaces for grasp detection results
- A ROS2 hand-eye calibration module generating transformation from camera frame to robot frame
- Robot interfaces controlling the phsical robot to move, pick, place, as well as to feedback robot states
- ROS2 example applications demonstrating how to use this ROS2 Grasp Library in advanced industrial usages for intelligent visual grasp