This document shows how to model your hardware system in Simics and how to extend Simics with new functionality. This document does not stand alone. The Simics and DML reference manuals are invaluable for the details. It is not intended to be read from start to finish. After reading the introduction part feel free to read about the topics which interest you.
You need the Simics Model Builder product to develop models and extensions for Simics.
This document is divided into several parts:
This document focuses on modeling the behavior of a system. Read the Analyzer User's Guide for information on modeling timing and caches in Simics.
The introduction chapter you are reading describes the concepts of system modeling and how they map to modeling in Simics. It also discusses the kind of information that must be gathered to model a system. After reading it you should have a basic understanding of what modeling is and what information about the hardware you need to gather.
Simics provides a full systems simulation environment for CPUs, boards, platforms, racks and even very complex heterogeneous systems networked together. A model provides the software running on a virtual platform within the Simics environment with a representation of the hardware interface that is exposed to the software, i.e., a "programmer's view".
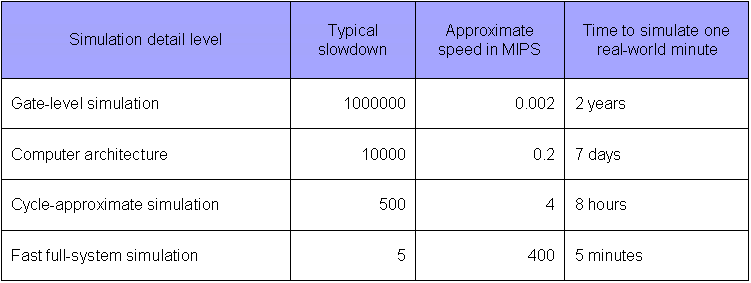
When creating models, it is important to choose the right level of abstraction. A comparison can be made with the field of physics, where different models are used for solving different types of problems. For example, on the sub-atomic scale quantum mechanics is used, to compute the motion of Earth-bound objects classical mechanics is used, and for objects moving at high speed relativistic models are used. Choosing the wrong model for a problem will either make it intractable or will not provide enough detail to yield correct results. The same goes for models of digital systems where a number of different abstraction levels are typically used. As more details are added to the simulation, the slower it will run and the more costly it will be to develop. There exists a trade off between simulation speed and model fidelity. Figure 1 shows the characteristics for some commonly used abstractions. Note that the figure serves as an illustration and actual performance may vary substantially even within a specific abstraction.
A Simics functional model presents the software with a functionally accurate view into the virtualized hardware. Functional models are transaction based, applying a blackbox/transfer function approach where it is not important to duplicate how a specific result is obtained, but to duplicate what the exact transfer function will result in. For timing-critical sections (e.g., device drivers response to interrupts, etc.), Simics provides the ability to insert delays that can be fine-tuned to model not only what data is provided, but also when that data is provided to the remainder of the system.
Using this approach, a functional model can be built based solely on hardware design and interface documents combined with some knowledge of the expectations and requirements of the operating system(s) running on top of that hardware. When building a functional model, there is no need to have detailed knowledge on the inner workings of the platform or device.
Today’s systems consist of many components including multi-core CPUs, multiple platforms, accelerators, racks, and heterogeneous combinations of CPU, DSP, ASIC and FPGA all connected via standard network, RapidIO, or backplane communication mechanisms. Although many simulation environments and the models which they run are specific to a specific CPU core or maybe a System on Chip (SoC), these solutions fail to support the complete system. Simics support for heterogeneous models and distributed host simulation processing provides the ability to model very complex systems while retaining a level of performance that is usable for real software development tasks.
A Simics system model may consist of tens, hundreds or thousands of smaller, independent models (CPU, platform, rack, etc.), any one of which can be created by an independent engineer and/or in different modeling languages. These smaller models, standing alone from a functional perspective, are connected together using Simics component system and scripting capability, or with one of Simics communications network infrastructure models (TCP/IP, MIL-STD-1553, RapidIO, etc.) in order to provide the full systems model and simulation. This sub-element independence and flexibility allows a full system model to be created from disparate components and by leveraging in-house and 3rd party expertise.
A typical customer’s Simics model team encompasses two key areas of knowledge.
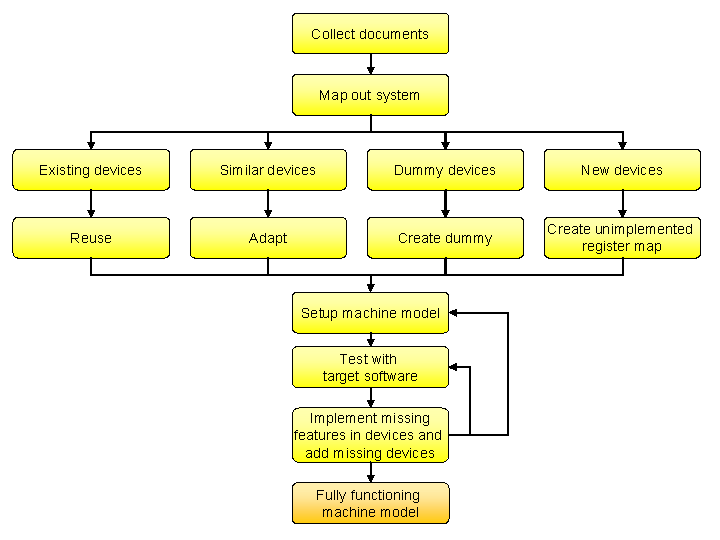
The processes when virtualizing a new system roughly follows this outline:
This methodology is the classic iterative method, where you test the model early and often in order to explore the precise requirements. Historically, this had many names, from spiral model to agile methods or test-driven development.
The goal is to obtain a model which runs the required software, but which implements only the hardware functionality necessary to run the software and exercise its interesting behaviors. Over time, more functionality can be added to the model.
Often, it is possible to start using the new virtual system almost immediately after the project start. Even a basic system that does not yet contain all components can be used to begin software development. For example, a boot loader typically requires less virtual hardware to be in place than a full operating system port. Over time, more devices will be added to the virtual system, and it will evolve towards the final model.
With Simics's modular approach, it is always possible to go back and improve any element of the model.
In Transaction-Level Device Modeling (TLM), each interaction with a device, typically, a processor reading from or writing to the registers of the devices, is handled at once: the device is presented with a request, computes the reply, and returns it in a single function call. This is far more efficient and easier to program than modeling the details of how bits and bytes are moved across interconnects, cycle-by-cycle.
In general, immediate non-pipelined completion of an operation is sufficient for modeling device's behavior. When the device driver expects a delay, that delay must be modeled, however the specific action or activity that leads to the delay does not need to be modeled. A classic example is a device that uses a hardware interrupt to signal command completion. The driver expects to be able to run code to prepare for the interrupt after writing the command to the device. In a transactional model, the device model must include a delay between the completion of the command and the interrupt signaling the completion to the system. In this manner, the device local effects of a transaction are computed immediately, but notification of completion is deferred until the proper time has elapsed.
Transaction-level models are typically implemented using the DML tool. DML provides a C-like programming language designed specifically for this type of modeling. Although device models can be written directly in C, using DML reduces development time and makes the code more readable and maintainable, and reduces the risk of making errors.
The memory map is a fundamental service provided by the Simics framework, and is a core component in enabling very fast simulation. The address space of a processor is modeled by Simics as a memory map. This approach allows the processor to directly access memories and devices without involving any explicit models of buses. This approach provides a functionally correct memory interface to the software, since software is unaware of how the data gets from the memory to the processor, and results in fast instruction execution and data access. With this approach, Simics's core memory handling is able to provide a virtual system with very fast read/write access to RAM and read access to FLASH and ROM without the requirement to involve any explicit device models.
Even when a Simics model includes a memory controller it is only used to manipulate, initialize or control the underlying activity of the Simics memory system and not as a component which is directly involved in accessing memory.
Simics also provides image objects to manage data for devices with large amounts of memory such as RAM, ROM, Flash, and disks. Image features include lazy allocation of host memory so that only data which is actually used is loaded. This allows Simics to simulate target memories which are larger than the physical memory of the host machine. Images also support incremental checkpoints of the system state.
For the simulation of PCI and similar interfaces where there are several levels of addressing being used, Simics uses subordinate memory maps cascaded from the primary memory map. This makes it easy to translate real-system mappings into the Simics system configuration. This method allows PCI models in Simics to support software probing and configuration, just like real PCI systems. The software setup is reflected in the PCI memory map, and device accesses are kept very efficient.
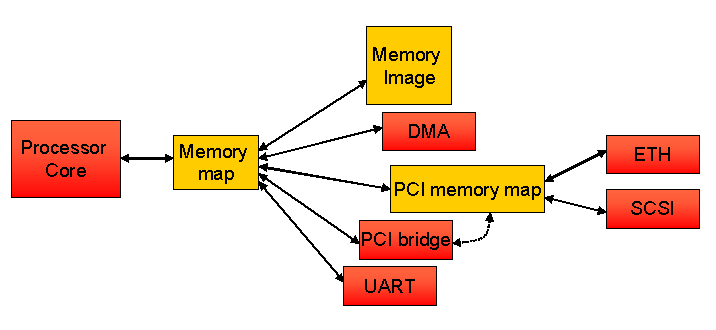
The illustration in figure 3 shows a simple example of how Simics uses memory spaces to map the processor's memory range to its immediately connected memory and devices, as well as across a PCI system to Ethernet and SCSI controllers. The PCI bridge will configure the PCI memory map when the software configures the PCI system, but will not be invoked in actual accesses to PCI devices.
The DML tool has been developed to support high performance and high level abstraction for all system devices with the exception of processors. When running simulation with functional models of devices the vast majority of host processing is used to simulate the target processors. As a result processor models (sometimes referred to as Instruction Set Simulators (ISS)) provided by Simics teams are highly optimized and tightly integrated into Simics. The result is that, at peak speeds, Simics can run billions of simulated instructions per second.
In order to run all the software of a system, the processor must implement both the user-level and supervisor-level interfaces of the processors, as well as the memory-management unit and various low-level machine registers. Anything that is readable or writable from the software side has to be modeled. Simics provides a large library of fast and functionally complete and correct processor models for most common embedded and desktop architectures including PowerPC, MIPS, ARM, SPARC, and x86.
For customers with pre-existing processor models or who desire to develop their own processor models, Simics provides an API that supports the integration of those models into the Simics framework. See the Processor Model Integration Guide for details.
Recall that a full system model in Simics is comprised of multiple, smaller sub-models and that Simics provides concurrent support for multiple modeling languages. Thus, Simics provides developers with the ability to run or reuse models that were not specifically written for Simics, such as SystemC* models, custom C/C++ models, etc. The most general way to integrate such a model into a Simics simulation is to write a wrapper for the other model to translate its APIs to the Simics framework's C/C++ API.
This approach can be used for almost any type of model, including models designed to run at similar abstraction levels as regular Simics models, or other types of models such as physics or hardware description language (HDL) models. If the abstraction level or APIs used by the foreign model is very different from that of Simics, it may require advanced techniques to do such an integration. Please contact your Simics provider to get more information about options and next steps.
To enable the integration of unmodified SystemC models into a Simics simulation, use the SystemC Library add-on package. Consult the SystemC Library Programming Guide for details. Please contact your Simics provider to get access to the SystemC Library package.
Simics models take a functional approach to modeling where entire transactions are handled in a single function.
Models should focus on the what instead of the how.
Models should be incrementally created to support different phases of the product development life cycle.
Functional models can be quickly created and connected together like building blocks.
Before starting to build a system model, certain information should be collected. Since obtaining documentation can sometimes take time, it is a good idea to start looking for documentation and information as early as possible in a modeling project. Documents and information that Simics professionals have found to be particularly useful are:
Once you have a basic understanding of the system, you should prioritize the list of components that need to be modeled. The following approach works well for many projects: