Command-Graph Extension¶
This document describes the implementation design of the SYCL Graph Extension.
Resources¶
A recording of a presentation on the extension can be found on Youtube.
A blog post introducing the extension can be found on Codeplay.com.
Requirements¶
An efficient implementation of a lazy command-graph execution and its replay
requires extensions to the Unified Runtime (UR) layer. Such an extension is
the command-buffer experimental feature, where a command-buffer object
represents a series of operations to be enqueued to the backend device and
their dependencies. A single command-graph can be partitioned into more
than one command-buffer by the runtime. The SYCL Graph extension
distinguishes between backends that support the command-buffer extension
and those that do not, and only reports support for the extension via the
aspect::ext_oneapi_graph aspect on backends that do support command-buffers.
See the Backend Implementation section of this document for details of support of different SYCL backends.
UR Command-Buffer Experimental Feature¶
The command-buffer concept has been introduced to UR as an experimental feature. See the UR EXP-COMMAND-BUFFER specification for details.
Device support for SYCL-Graph is communicated to the user via two aspects.
The aspect::ext_oneapi_limited_graph aspect for basic graph support and
the aspect::ext_oneapi_graph aspect for full graph support.
The UR_DEVICE_INFO_COMMAND_BUFFER_SUPPORT_EXP query result is used by the
SYCL-RT to inform whether to report aspect::ext_oneapi_limited_graph.
Reporting of the aspect::ext_oneapi_graph aspect is based on the
UR_DEVICE_INFO_COMMAND_BUFFER_UPDATE_CAPABILITIES_EXP query result. For
a device to report this aspect, the UR query must report support for all of:
UR_DEVICE_COMMAND_BUFFER_UPDATE_CAPABILITY_FLAG_KERNEL_ARGUMENTSUR_DEVICE_COMMAND_BUFFER_UPDATE_CAPABILITY_FLAG_LOCAL_WORK_SIZEUR_DEVICE_COMMAND_BUFFER_UPDATE_CAPABILITY_FLAG_GLOBAL_WORK_SIZEUR_DEVICE_COMMAND_BUFFER_UPDATE_CAPABILITY_FLAG_GLOBAL_WORK_OFFSETUR_DEVICE_COMMAND_BUFFER_UPDATE_CAPABILITY_FLAG_KERNEL_HANDLE
Design¶

There are two sets of user facing interfaces that can be used to create a command-graph object: Explicit and Record & Replay API. Within the runtime they share a common infrastructure.
Nodes & Edges¶
A node in a graph is a SYCL command-group (CG) that is defined by a command-group function (CGF).
Internally, a node is represented by the detail::node_impl class, and a command-group
by the sycl::detail::CG class. An instance of detail::node_impl stores a
sycl::detail::CG object for the command-group that the node represents.
A command-group handler
lets the user define the operations that are to be performed in the command-group,
e.g. kernel execution, memory copy, host-task. In DPC++ an internal “finalization”
operation is done inside the sycl::handler implementation, which constructs a
CG object of a specific type. During normal operation, handler::finalize()
then passes the CG object to the scheduler, and a sycl::event object
representing the command-group is returned.
However during graph construction, inside hander::finalize() the CG object is
not submitted for execution as normal, but stored in the graph as a new node
instead.
When a user adds a node to a graph using the explicit
command_graph<modifiable>::add() API passing a CGF, in our graph runtime
implementation a sycl::handler object is constructed with a graph parameter
telling it to not submit the CG object to the scheduler on finalization.
This handler finalizes the CGF, and after finalization the CG object from the
handler is moved to the node.
For creating a node in the graph using queue recording mode. When the
sycl::handler from a queue submission is finalized, if the queue the
handler was created from is in the recording mode, then the handler knows
not to submit the CG object to the scheduler. Instead, the CG object is
added to the graph associated with the queue as a new node.
Edges are stored in each node as lists of predecessor and successor nodes.
Execution Order¶
Graph nodes are currently linearized into execution order using a topological sort algorithm. This algorithm uses a breadth-first search approach and is an implementation of Kahn’s algorithm. Alternative algorithms, such as depth-first search, are possible and may give better performance on certain workloads/hardware. However, depth first searches are usually implemented using recursion, which can lead to stack overflow issues on large graphs. In the future, there might be options for allowing the user to control this implementation detail. It might also be possible to automatically change which algorithm is used based on characteristics such as the graph’s size.
Scheduler Integration¶
When there are no requirements from accessors in a command-graph submission, the scheduler is bypassed and the underlying UR command-buffer is directly enqueued to a UR queue. If there are accessor requirements, the UR command-buffer for the executable graph needs to be enqueued by the scheduler.
When individual graph nodes have requirements from SYCL accessors, the
underlying sycl::detail::CG object stored in the node is copied and passed to
the scheduler for adding to the UR command-buffer, otherwise the node can
be appended directly as a command in the UR command-buffer. This is in-keeping
with the existing behavior of the handler with normal queue submissions.
Scheduler commands for adding graph nodes differ from typical command-group submission in the scheduler, in that they do not launch any asynchronous work which relies on their dependencies, and are considered complete immediately after adding the command-group node to the graph.
This presents problems with device allocations which create both an allocation command and a separate initial copy command of data to the new allocation. Since future command-graph execution submissions will only receive dependencies on the allocation command (since this is all the information available), this could lead to situations where the device execution of the initial copy command is delayed due to device occupancy, and the command-graph and initial copy could execute on the device in an incorrect order.
To solve this issue, when the scheduler enqueues command-groups to add as nodes in a command-graph, it will perform a blocking wait on the dependencies of the command-group first. The user will experience this wait as part of graph finalization.
Graph Partitioning¶
To handle dependencies from other devices, the graph can be partitioned during the finalization process. A partition is a set of one or more nodes intended to run on the same device. Each partition instantiates a command-buffer (or equivalent) which contains all the commands to be executed on the device. Therefore, the partitioning only impacts graphs in the executable state and occurs during finalization. Synchronization between partitions is managed by the runtime unlike internal partition dependencies that are handled directly by the backend.
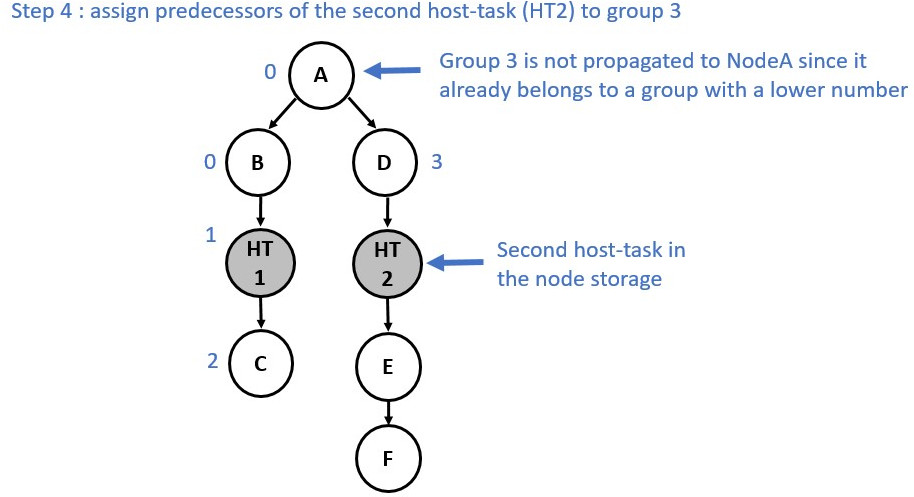
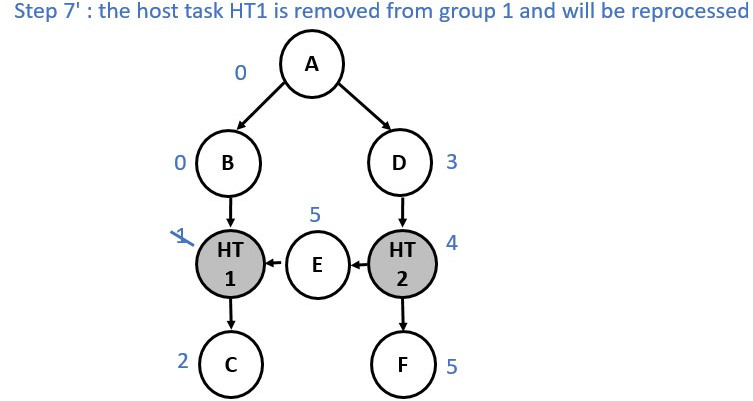
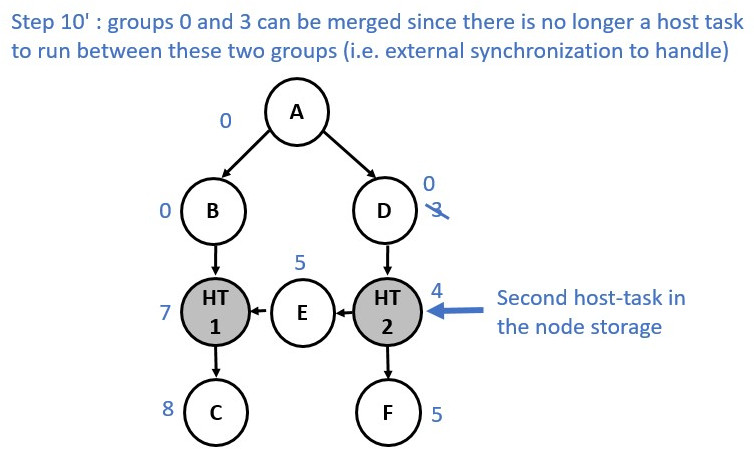
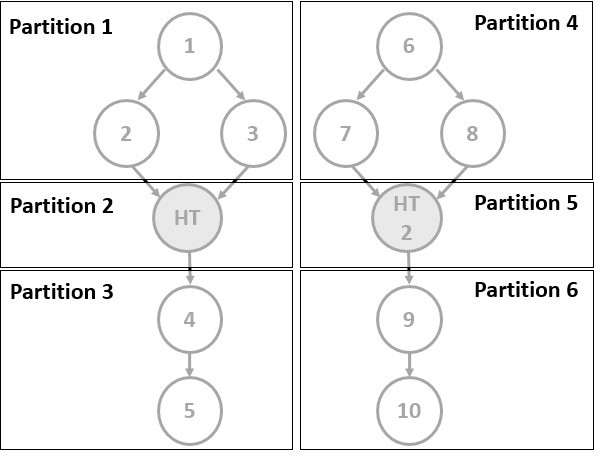
Since runtime synchronization and multiple command-buffer involves extra latency, the implementation ensures to minimize the number of partitions. Currently, the creation of a new partition is triggered by a node containing a host-task. When a host-task is encountered the predecessors of this host-task node are assigned to one partition, the host-task is assigned to another partition, and the successors are assigned to a third partition as shown below:
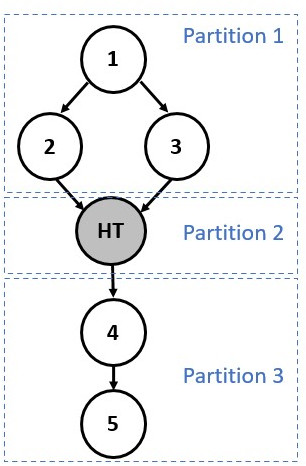
Partition numbers are allocated in order. Hence, the runtime must ensure that
Partition n complete before starting execution of Partition n+1.
Note that partitioning can only happen during the finalization stage due to
potential backward dependencies that could be created using
the make_edge function.
Example¶
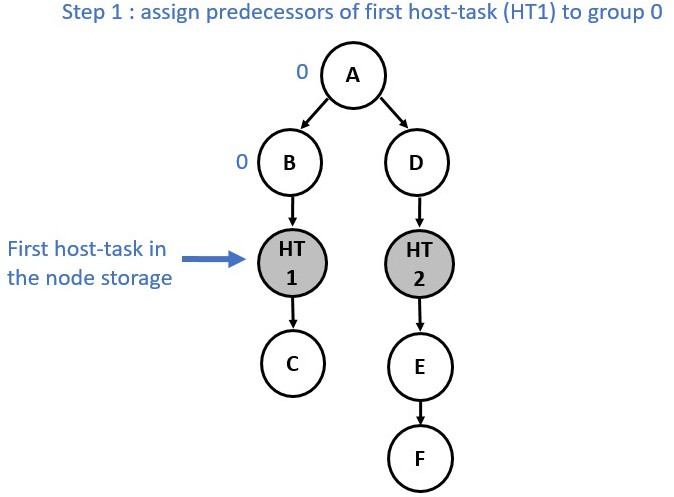
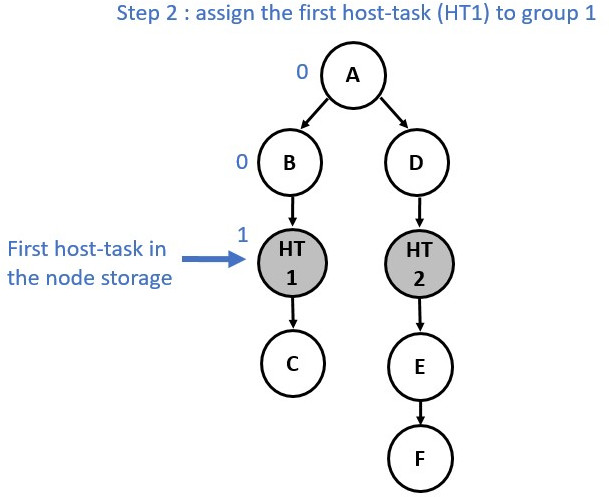
The partitioning process is achieved is two main stages:
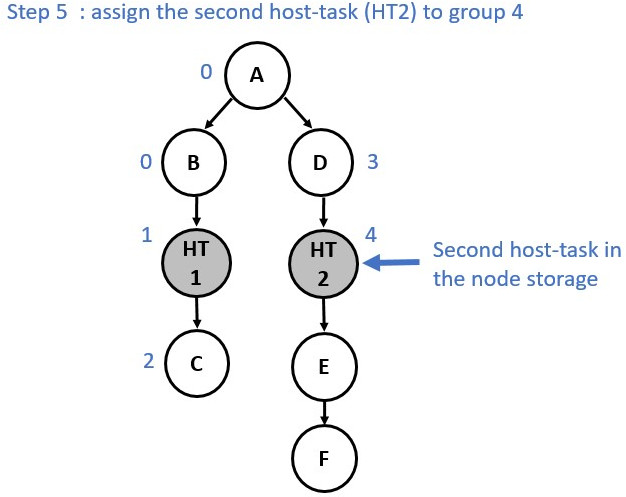
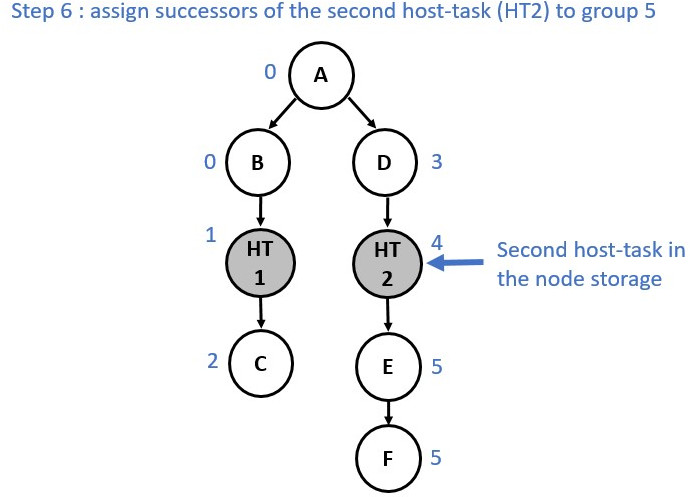
1 - Nodes are assigned to a temporary group/partition.
2 - Once all the nodes have been annotated with a group number, actual partitions are created based on these annotations.
The following diagrams show the annotation process:
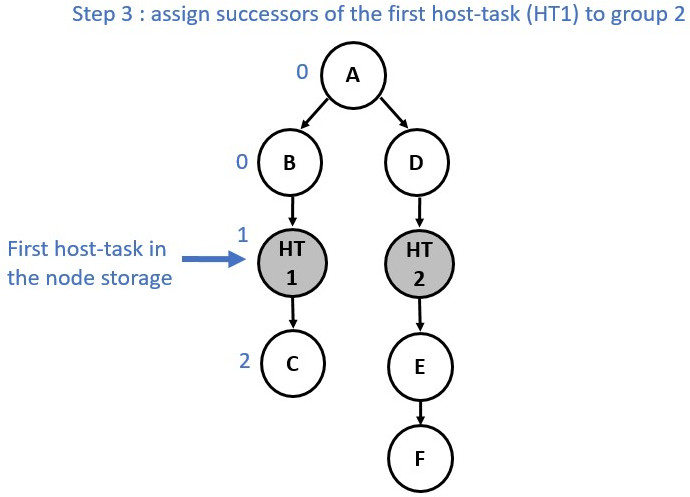
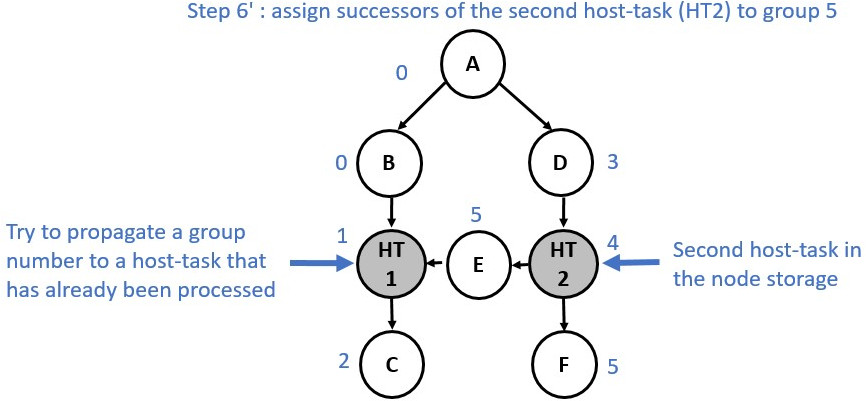
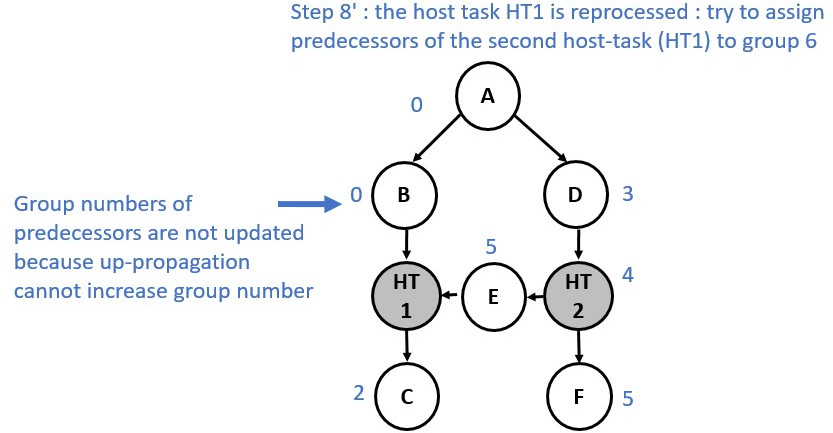
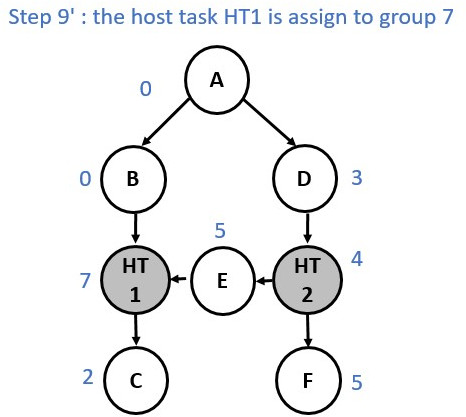
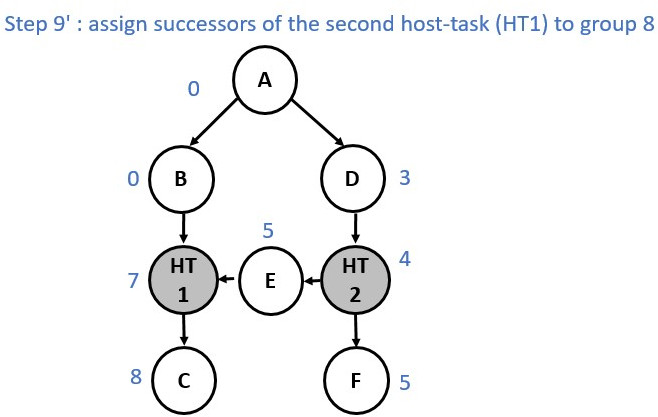
Now consider a slightly different graph. We used the make_edge function to
create a dependency between Node E and Node HT1. The first 5 steps are identical.
However, from the step 6 the process changes and a group merge is needed as
illustrated in the following diagrams:
Multiple Roots Execution Flow¶
The following diagram shows the partitions of a graph with two roots and a host-task in each branch.
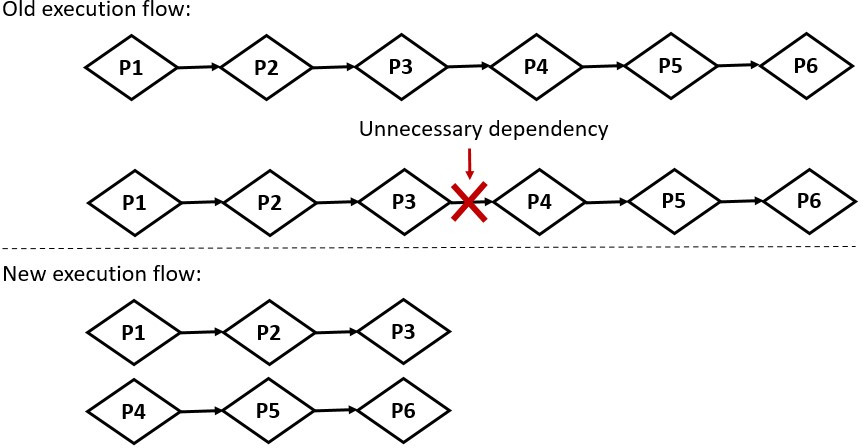
When executing this graph, the partitions were enqueued one after the other, with each partition waiting for the previous one to complete (see top of the following diagram). However, for a multi-root graph, this behavior adds unnecessary dependencies between partitions, slowing down the execution of the whole graph. Now, we keep track of the actual predecessors of each partition and only enforce dependencies between partitions when necessary. In our example, the extra dependency is therefore removed and both branches can be executed concurrently. But as we can see on this diagram, this new approach can involve multiple execution tails, which leads to difficulties when we want to know when the graph execution has finished. To cope with this issue, the events associated to the completion of each partition are linked to the event returned to users. Hence, when the returned event is complete, we can guarantee that all work associated with the graph has been completed.
Memory handling: Buffer and Accessor¶
There is no extra support for graph-specific USM allocations in the current
proposal. Memory operations will be supported subsequently by the current
implementation starting with memcpy.
Buffers and accessors are supported in a command-graph. There are spec restrictions on buffer usage in a graph so that their lifetime semantics are compatible with a lazy work execution model. However these changes to storage lifetimes have not yet been implemented.
Graph Update¶
Design Challenges¶
Explicit Update¶
Explicit updates of individual nodes faces significant design challenges in SYCL:
Lambda capture order is explicitly undefined in C++, so the user cannot reason about the indices of arguments captured by kernel lambdas.
Once arguments have been captured the actual type information is lost in the transition through the integration header and extracting arguments in the SYCL runtime, therefore we cannot automatically match new argument values by querying the captured arguments without significant possibility for collisions. For example, if a kernel captures two USM pointers and the user wishes to update one, we cannot reason about which pointer they actually want to update when we only know that: they are pointer args of a certain size.
The current approach is to limit graph update to the explicit APIs and where the
user is using handler::set_arg() or some equivalent to manually set kernel
arguments using indices. Therefore when updating we can use indices to avoid
collisions. In practice there are only a few current scenarios where set_arg()
can be used:
The proposed “Free Function Kernel” extension
OpenCL interop kernels created from SPIR-V source at runtime.
A workaround for the lambda capture issues is the “Whole-Graph Update” feature. Since the lambda capture order is the same across two different recordings, we can match the parameter order when updating.
Whole-Graph Update¶
The current implementation of the whole-graph update feature relies on the assumption that both graphs should have a similar topology. Currently, the implementation only checks that both graphs have an identical number of nodes and that each node contains the same number of edges. Further investigation should be done to see if it is possible to add extra checks (e.g. check that the nodes and edges were added in the same order).
Scheduler Integration¶
Graph updates in the runtime are synchronous calls however they can optionally
be done through the scheduler using a new command,
sycl::detail::UpdateCommandBufferCommand. This is needed when dealing with
accessor updates. Since a new buffer which the user creates for updating may not
yet have been lazily initialized on device we schedule a new command which has
requirements for these new accessors to correctly trigger allocations before
updating. This is similar to how individual graph commands are enqueued when
accessors are used in a graph node.
Dynamic Command-Group¶
To implement the dynamic_command_group class for updating the command-groups (CG)
associated with nodes, the CG member of the node implementation class changes
from a std::unique_ptr to a std::shared_ptr so that multiple nodes and the
dynamic_command_group_impl object can share the same CG object. This avoids
the overhead of having to allocate and free copies of the CG when a new active
CG is selected.
The dynamic_command_group_impl class contains a list of weak pointers to the
nodes which have been created with it, so that when a new active CG is selected
it can propagate the change to those nodes. The dynamic_parameter_impl class
also contains a list of weak pointers, but to the dynamic_command_group_impl
instances of any dynamic command-groups where they are used. This allows
updating the dynamic parameter to propagate to dynamic command-group nodes.
The sycl::detail::CGExecKernel class has been added to, so that if the
object was created from an element in the dynamic command-group list, the class
stores a vector of weak pointers to the other alternative command-groups created
from the same dynamic command-group object. This allows the SYCL runtime to
access the list of alternative kernels when calling the UR API to append a
kernel command to a command-buffer.
Graph-Owned Memory Allocations¶
Device Allocations¶
Device allocations for graphs are implemented using virtual memory. Allocation commands performing a virtual reservation for the provided size, and physical memory is created and mapped only during graph finalization. This allows valid device addresses to be returned immediately when building the graph without the penalty of doing any memory allocations during graph building, which could have a negative impact on features such as whole-graph update through increased overhead.
Behaviour of async_free¶
async_free nodes are treated as hints rather than an actual memory free
operation. This is because deallocating during graph execution is both
undesirable for performance and not feasible with the current
implementation/backends. Instead a free node represents a promise from the user
that the memory is no longer in use. This enables optimizations such as
potentially reusing that memory for subsequent allocation nodes in the graph.
This allows us to reduce the total amount of concurrent memory required by a
single graph.
Optimizations¶
Interactions with Profiling¶
Enabling profiling on a graph may disable optimizations from being performed on the graph if they are incompatible with profiling. For example, enabling profiling prevents the in-order optimization since the removal of events would prevent collecting profiling information.
In-Order Graph Partitions¶
On finalization graph partitions are checked to see if they are in-order, i.e. the graph follows a single path where each node depends on the previous node. If so a hint is provided to the backend that it may create the command-buffers in an in-order fashion. Support for this is backend specific but it may provide benefits through the removal of the need for synchronization primitives between kernels.
This optimization is only performed in this very limited case where it can be safely assumed to be more performant. It is not likely we’ll try to allow in-order execution in more scenarios through a complicated (and imperfect) heuristic but rather expose this as a hint the user can provide.
Graph Allocation Memory Reuse¶
When adding a new allocation node to a graph, memory allocations which have
previously been freed are checked to see if they can be reused. Because we have
to return a pointer to the user immediately when the CGF for a node is
processed, we have to do this eagerly anytime async_malloc() is called.
Allocations track the last free node associated with them to represent the most
recent use of that allocation.
To be reused, the two allocations must meet these criteria:
They must be of the same allocation type (device/host/shared).
They must have a matching size.
They must have the same properties (currently only read-only matters).
There must be a path from the last free node associated with a given allocation to the new allocation node being added.
If these criteria are met we update the last free node for the allocation and return the existing pointer to the user.
Backend Implementation¶
Implementation of UR command-buffers for each of the supported SYCL 2020 backends.
Backends which are implemented currently are: Level Zero, CUDA, HIP and partial support for OpenCL.
Level Zero¶
The command-buffer implementation for the level-zero adapter has 2 different implementation paths which are chosen depending on the device and level-zero version:
Immediate Append path - Relies on zeCommandListImmediateAppendCommandListsExp to submit the command-buffer. This function is an experimental extension to the level-zero API.
Wait event path - Relies on zeCommandQueueExecuteCommandLists to submit the command-buffer work. However, this level-zero function has limitations and, as such, this path is used only when the immediate append path is unavailable.
Immediate Append Path Implementation Details¶
This path is only available when the device supports immediate command-lists
and the zeCommandListImmediateAppendCommandListsExp
API. This API can wait on a list of event dependencies using the phWaitEvents
parameter and can signal a return event when finished using the hSignalEvent
parameter. This allows for a cleaner and more efficient implementation than
what can be achieved when using the wait-event path
(see this section for
more details about the wait-event path).
This path relies on 3 different command-lists in order to execute the command-buffer:
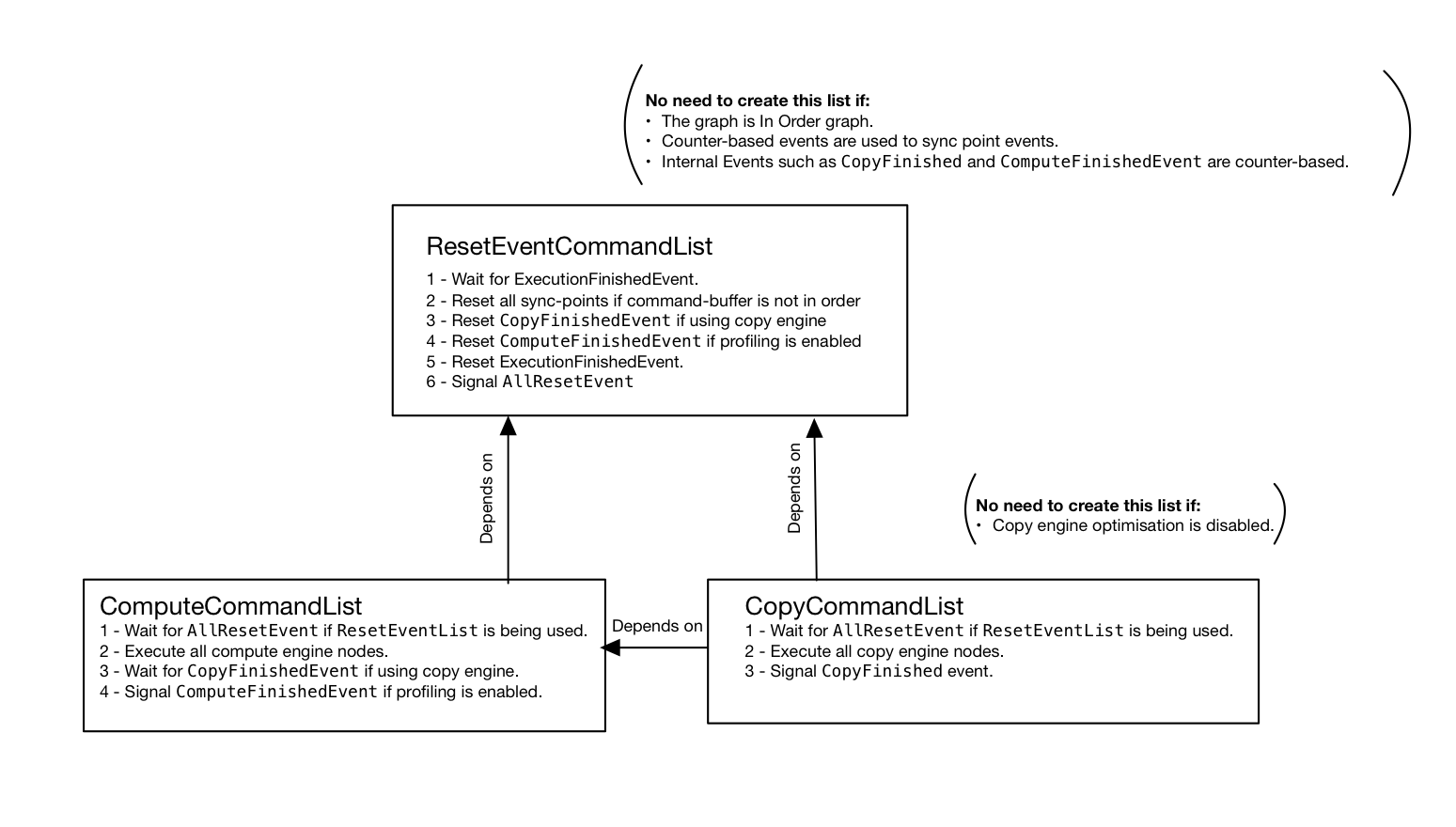
ComputeCommandList- Used to submit command-buffer work that requires the compute engine.CopyCommandList- Used to submit command-buffer work that requires the copy engine. This command-list is not created when none of the nodes require the copy engine.EventResetCommandList- Used to reset the level-zero events that are needed for every submission of the command-buffer. This is executed after the compute and copy command-lists have finished executing. For the first execution, this command-list is skipped since there is no need to reset events at this point. When counter-based events are enabled (i.e. the command-buffer is in-order), this command-list is not created since counter-based events do not need to be reset.
The following diagram illustrates which commands are executed on
each command-list when the command-buffer is enqueued:
Additionally, zeCommandListImmediateAppendCommandListsExp requires an extra command-list which is used to submit the other command-lists. This command-list has a specific engine type associated to it (i.e. compute or copy engine). Hence, for our implementation, we need 2 of these helper command-lists:
The
CommandListHelpercommand-list is used to submit theComputeCommandList,CommandListResetEventsand profiling queries.The
ZeCopyEngineImmediateListHelpercommand-list is used to submit theCopyCommandList
Wait event Path Implementation Details¶
The UR urEnqueueCommandBufferExp interface for submitting a command-buffer
takes a list of events to wait on, and returns an event representing the
completion of that specific submission of the command-buffer.
However, in the equivalent Level Zero function zeCommandQueueExecuteCommandLists there are no parameters to take a wait-list, and the only sync primitive returned is blocking on host.
In order to achieve the expected UR command-buffer enqueue semantics with Level Zero, the adapter implementation needs extra commands.
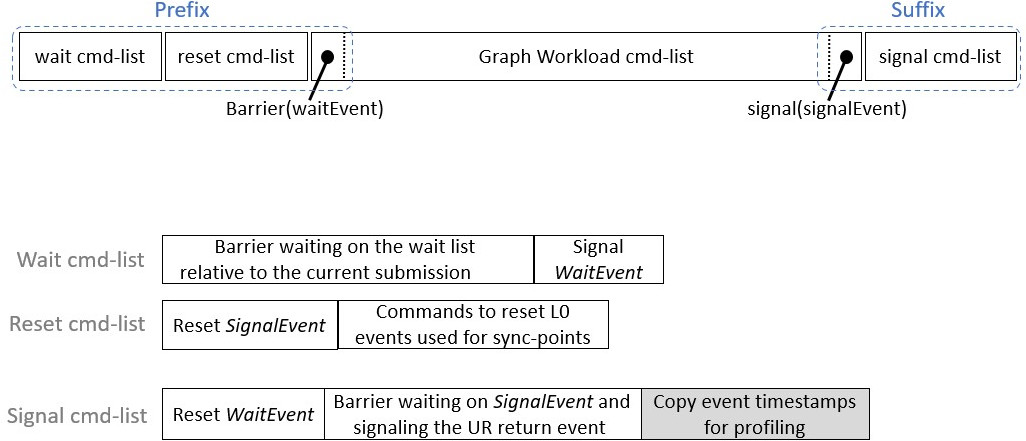
Prefix - Commands added before the graph workload.
Suffix - Commands added after the graph workload.
These extra commands operate on L0 event synchronization primitives, used by the command-list to interact with the external UR wait-list and UR return event required for the enqueue interface. Unlike the graph workload (i.e. commands needed to perform the graph workload) the external UR wait-list and UR return event are submission dependent, which mean they can change from one submission to the next.
For performance concerns, the command-list that will execute the graph workload is made only once (during the command-buffer finalization stage). This allows the adapter to save time when submitting the command-buffer, by executing only this command-list (i.e. without enqueuing any commands of the graph workload).
Prefix¶
The prefix’s commands aim to:
Handle the list of events to wait on, which is passed by the runtime when the UR command-buffer enqueue function is called. As mentioned above, this list of events changes from one submission to the next. Consequently, managing this mutable dependency in the graph-workload command-list implies rebuilding the command-list for each submission (note that this can change with mutable command-list). To avoid the significant time penalty of rebuilding this potentially large command-list each time, we prefer to add an extra command handling the wait list into another command-list (wait command-list). This command-list consists of a single L0 command: a barrier that waits for dependencies passed by the wait-list and signals a signal called WaitEvent when the barrier is complete. This WaitEvent is defined in the
ur_exp_command_buffer_handle_tclass. In the front of the graph workload command list, an extra barrier command waiting for this event is added (when the command-buffer is created). This ensures that the graph workload does not start running before the dependencies to be completed. The WaitEvent event is reset in the suffix.Reset events associated with the command-buffer except the WaitEvent event. Indeed, L0 events needs to be explicitly reset by an API call (L0 command in our case). Since a command-buffer is expected to be submitted multiple times, we need to ensure that L0 events associated with graph commands have not been signaled by a previous execution. These events are therefore reset to the non-signaled state before running the graph-workload command-list. Note that this reset is performed in the prefix and not in the suffix to avoid additional synchronization w.r.t profiling data extraction. We use a new command list (reset command-list) for performance concerns. Indeed:
This allows the WaitEvent to be signaled directly on the host if the waiting list is empty, thus avoiding the need to submit a command list.
Enqueuing a reset L0 command for all events in the command-buffer is time consuming, especially for large graphs. However, this task is not needed for every submission, but only once, when the command-buffer is fixed, i.e. when the command-buffer is finalized. The decorrelation between the reset command-list and the wait command-list allow us to create and enqueue the reset commands when finalizing the command-buffer, and only create the wait command-list at submission.
This command list consists of a reset command for each of the graph commands
and another reset command for resetting the signal we use to signal the
completion of the graph workload. This signal is called SignalEvent and is
defined in the ur_exp_command_buffer_handle_t class.
Suffix¶
The suffix’s commands aim to:
Handle the completion of the graph workload and signal a UR return event. Thus, at the end of the graph workload command-list a command, which signals the SignalEvent, is added (when the command-buffer is finalized). In an additional command-list (signal command-list), a barrier waiting for this event is also added. This barrier signals, in turn, the UR return event that has be defined by the runtime layer when calling the
urEnqueueCommandBufferExpfunction.Manage the profiling. If a command-buffer is about to be submitted to a queue with the profiling property enabled, an extra command that copies timestamps of L0 events associated with graph commands into a dedicated memory which is attached to the returned UR event. This memory stores the profiling information that corresponds to the current submission of the command-buffer.
For a call to urEnqueueCommandBufferExp with an event_list EL,
command-buffer CB, and return event RE our implementation has to submit three
new command-lists for the above approach to work. Two before the command-list
with extra commands associated with CB, and the other after CB. These new
command-lists are retrieved from the UR queue, which will likely reuse existing
command-lists and only create a new one in the worst case.
Drawbacks¶
There are three drawbacks of this approach to implementing UR command-buffers for Level Zero:
3x the command-list resources are used, if there are many UR command-buffers in flight, this may exhaust L0 driver resources. A trivial graph requires 3 L0 command-lists and if we implement partitioning a graph into multiple UR command-buffers, then each partition will contain 3 L0 command-lists.
Each L0 command-list is submitted individually with a
ur_queue_handle_t_::executeCommandListcall which introduces serialization in the submission pipeline that is heavier than having a barrier or awaitForEventson the same command-list. Resulting in additional latency when executing a UR command-buffer.Dependencies between multiple submissions must be handled by the runtime. Indeed, when a second submission is performed the signal conditions of WaitEvent are redefined by this second submission. Therefore, this can lead to an undefined behavior and potential hangs especially if the conditions of the first submissions were not yet satisfied and the event has not yet been signaled.
Future work will include exploring L0 API extensions to improve the mapping of UR command-buffer to L0 command-list.
Copy Engine¶
For performance considerations, the Unified Runtime Level Zero adapter uses different Level Zero command-queues to submit compute kernels and memory operations when the device has a dedicated copy engine. To take advantage of the copy engine when available, the graph workload can also be split between memory operations and compute kernels. To achieve this, two graph workload command-lists live simultaneously in a command-buffer.
When the command-buffer is finalized, memory operations (e.g. buffer copy, buffer fill, …) are enqueued in the copy command-list while the other commands are enqueued in the compute command-list. On submission, if not empty, the copy command-list is sent to the main copy command-queue while the compute command-list is sent to the compute command-queue.
Both are executed concurrently. Synchronization between the command-lists is handled by Level Zero events.
CUDA¶
The SYCL Graph CUDA backend relies on the CUDA Graphs feature, which is the CUDA public API for batching series of operations, such as kernel launches, connected by dependencies.
UR commands (e.g. kernels) are mapped as graph nodes using the CUDA Driver API. The CUDA Driver API is preferred over the CUDA Runtime API to implement the SYCL Graph backend to remain consistent with other UR functions. Synchronization between commands (UR sync-points) is implemented using graph dependencies.
Executable CUDA Graphs can be submitted to a CUDA stream in the same way as regular kernels. The CUDA backend enables enqueuing events to wait for into a stream. It also allows signaling the completion of a submission with an event. Therefore, submitting a UR command-buffer consists only of submitting to a stream the executable CUDA Graph that represent this series of operations.
An executable CUDA Graph, which contains all commands and synchronization information, is saved in the UR command-buffer to allow for efficient graph resubmission.
Prefetch & Advise¶
The urCommandBufferAppendUSMPrefetchExp and
urCommandBufferAppendUSMAdviseExp UR entry-points used to implement
handler::prefetch and handler::mem_advise are implemented in the CUDA UR
adapter as empty nodes enforcing the node dependencies. As such the
optimization hints are a no-op.
Native Command¶
CUDA child graphs are used to implement the urCommandBufferAppendNativeCommandExp
entry-point for sycl_ext_codeplay_enqueue_native_command SYCL-Graph support.
The SYCL native-command node exposes a CUDA-Graph object to the user, which is
then added as a child graph of the parent graph from the SYCL-graph. Therefore
any CUDA limitations that apply to the usage of child nodes in a graph, apply
to native-command nodes.
Using CUDA asynchronous allocation/free nodes in child graphs is only supported from CUDA 12.9. As a result adding these async alloc & free nodes to the CUDA-Graph handle given to a user inside a native-command is only supported in DPC++ builds against CUDA 12.9 and later when the SYCL-RT can take advantage of this CUDA functionality in the backend.
HIP¶
The HIP backend offers a graph management API very similar to CUDA Graph feature for batching series of operations. The SYCL Graph HIP backend implementation is therefore very similar to that of CUDA.
The minimum version of ROCm required to support sycl_ext_oneapi_graph is 5.5.1.
UR commands (e.g. kernels) are mapped as graph nodes using the HIP Management API. Synchronization between commands (UR sync-points) is implemented using graph dependencies. Executable HIP Graphs can be submitted to a HIP stream in the same way as regular kernels. The HIP backend enables enqueuing events to wait for into a stream. It also allows signaling the completion of a submission with an event. Therefore, submitting a UR command-buffer consists only of submitting to a stream the executable HIP Graph that represent this series of operations.
An executable HIP Graph, which contains all commands and synchronization information, is saved in the UR command-buffer to allow for efficient graph resubmission.
Prefetch & Advise¶
The urCommandBufferAppendUSMPrefetchExp and
urCommandBufferAppendUSMAdviseExp UR entry-points used to implement
handler::prefetch and handler::mem_advise are implemented in the HIP UR
adapter as empty nodes enforcing the node dependencies. As such the
optimization hints are a no-op.
Native Command¶
HIP child graphs are used to implement the urCommandBufferAppendNativeCommandExp
entry-point for sycl_ext_codeplay_enqueue_native_command SYCL-Graph support.
The SYCL native-command node exposes a HIP-Graph object to the user, which is
then added as a child graph of the parent graph from the SYCL-graph. Therefore
any CUDA limitations that apply to the usage of child nodes in a graph, apply
to native-command nodes.
Using HIP-Graph asynchronous allocation/free nodes in child graphs is not supported, and as a result adding async alloc & free nodes to the native HIP-Graph handle exposed to the user in a native-command will result in an exception when the graph is finalized.
OpenCL¶
SYCL-Graph is only enabled for an OpenCL backend when the cl_khr_command_buffer extension is available, however this information isn’t available until runtime due to OpenCL implementations being loaded through an ICD.
The UR_DEVICE_INFO_COMMAND_BUFFER_SUPPORT_EXP UR query returns true in the
OpenCL UR adapter based on
the presence of cl_khr_command_buffer, and the OpenCL device reporting
support for
CL_COMMAND_BUFFER_CAPABILITY_SIMULTANEOUS_USE_KHR.
The latter is required to enable multiple submissions of the same executable
command_graph object without having to do a blocking wait on prior submissions
in-between.
UR API Mapping¶
There are some gaps in both the OpenCL and UR specifications for Command Buffers shown in the list below. There are implementations in the UR OpenCL adapter where there is matching support for each function in the list.
UR |
OpenCL |
Supported |
|---|---|---|
urCommandBufferCreateExp |
clCreateCommandBufferKHR |
Yes |
urCommandBufferRetainExp |
clRetainCommandBufferKHR |
Yes |
urCommandBufferReleaseExp |
clReleaseCommandBufferKHR |
Yes |
urCommandBufferFinalizeExp |
clFinalizeCommandBufferKHR |
Yes |
urCommandBufferAppendKernelLaunchExp |
clCommandNDRangeKernelKHR |
Yes |
urCommandBufferAppendUSMMemcpyExp |
clCommandSVMMemcpyKHR |
Partial, see below |
urCommandBufferAppendUSMFillExp |
clCommandSVMMemFillKHR |
Partial, see below |
urCommandBufferAppendMembufferCopyExp |
clCommandCopyBufferKHR |
Yes |
urCommandBufferAppendMemBufferWriteExp |
No |
|
urCommandBufferAppendMemBufferReadExp |
No |
|
urCommandBufferAppendMembufferCopyRectExp |
clCommandCopyBufferRectKHR |
Yes |
urCommandBufferAppendMemBufferWriteRectExp |
No |
|
urCommandBufferAppendMemBufferReadRectExp |
No |
|
urCommandBufferAppendMemBufferFillExp |
clCommandFillBufferKHR |
Yes |
urCommandBufferAppendUSMPrefetchExp |
No |
|
urCommandBufferAppendUSMAdviseExp |
No |
|
urCommandBufferAppendNativeCommandExp |
Yes |
|
urEnqueueCommandBufferExp |
clEnqueueCommandBufferKHR |
Yes |
clCommandBarrierWithWaitListKHR |
No |
|
clCommandCopyImageKHR |
No |
|
clCommandCopyImageToBufferKHR |
No |
|
clCommandFillImageKHR |
No |
|
clGetCommandBufferInfoKHR |
No |
|
urCommandBufferUpdateKernelLaunchExp |
clUpdateMutableCommandsKHR |
Partial See Update Section |
We are looking to address these gaps in the future so that SYCL-Graph can be
fully supported on a cl_khr_command_buffer backend.
Unsupported Command Types¶
Due to the API mapping gaps documented in the previous section, OpenCL as a
SYCL backend cannot fully support the graph API. Instead, there are
limitations in the types of nodes which a user can add to a graph, using
an unsupported node type will cause a SYCL exception to be thrown in graph
finalization with error code sycl::errc::feature_not_supported and a message
mentioning the unsupported command. For example,
terminate called after throwing an instance of 'sycl::_V1::exception'
what(): USM copy command not supported by graph backend
The types of commands which are unsupported, and may lead to this exception are:
handler::copy(src, dest)- Wheresrcis an accessor anddestis a pointer. This corresponds to a memory buffer read command.handler::copy(src, dest)- Wheresrcis an pointer anddestis an accessor. This corresponds to a memory buffer write command.handler::copy(src, dest)orhandler::memcpy(dest, src)- Where bothsrcanddestare USM pointers. This corresponds to a USM copy command that is mapped toclCommandSVMMemcpyKHR, which will only work on OpenCL devices which don’t differentiate between USM and SVM.handler::fill(ptr, pattern, count)- This corresponds to a USM memory fill command that is mapped toclCommandSVMMemFillKHR, which will only work on OpenCL devices which don’t differentiate between USM and SVM.handler::memset(ptr, value, numBytes)- This corresponds to a USM memory fill command that is mapped toclCommandSVMMemFillKHR, which will only work on OpenCL devices which don’t differentiate between USM and SVM.handler::prefetch().handler::mem_advise().
Note that handler::copy(src, dest) where both src and dest are an accessor
is supported, as a memory buffer copy command exists in the OpenCL extension.
Update Support¶
Support for urCommandBufferUpdateKernelLaunchExp used to update the
configuration of kernel commands requires an OpenCL implementation with the
cl_khr_command_buffer_mutable_dispatch
extension.
However, the OpenCL adapter can not report aspect::ext_oneapi_graph for full
SYCL-Graph support. As the cl_khr_command_buffer_mutable_dispatch extension
has no concept of updating the cl_kernel objects in kernel commands, and so
can’t report the
UR_DEVICE_COMMAND_BUFFER_UPDATE_CAPABILITY_FLAG_KERNEL_HANDLE capability.
This extension limitation is tracked in by the OpenCL Working Group in an
OpenCL-Docs Issue.
UR Command-Buffer Implementation¶
Many of the OpenCL functions take a cl_command_queue parameter which is not
present in most of the UR functions. Instead, when a new command buffer is
created in urCommandBufferCreateExp we also create and maintain a new
internal ur_queue_handle_t with a reference stored inside of the
ur_exp_command_buffer_handle_t_ struct. The internal queue is retained and
released whenever the owning command buffer is retained or released.
With command buffers being an OpenCL extension, each function is accessed by loading a function pointer to its implementation. These are defined in a common header file in the UR OpenCL adapter. The symbols for the functions are however defined in OpenCL-Headers but it is not known at this time what version of the headers will be used in the UR GitHub CI configuration, so loading the function pointers will be used until this can be verified. A future piece of work would be replacing the custom defined symbols with the ones from OpenCL-Headers.
Available OpenCL Command-Buffer Implementations¶
Publicly available implementations of cl_khr_command_buffer that can be used
to enable the graph extension in OpenCL:
OneAPI Construction Kit (must enable
OCL_EXTENSION_cl_khr_command_bufferwhen building)